乍一看到JACC: Cardiovascular Imaging上的下面這個(gè)題目,筆者感覺自己錯(cuò)過了一個(gè)世紀(jì)����,什么時(shí)候機(jī)器人輔助超聲已經(jīng)可以寫社論了?這個(gè)應(yīng)用已經(jīng)如此廣泛了����?趕緊來學(xué)習(xí)學(xué)習(xí)。
圖1 剛剛發(fā)表在JACC: Cardiovascular Imaging上的原文
于是�,筆者首先搜索了這兩位作者,均來自于澳大利亞墨爾本(畢竟土澳地廣人稀~)��,一位是Baker Heart and biabetes Institute的Leah Wright博士�,另一位是Swinburne University of Technology中Department of Mechanical Engineering and Product Design Engineering的Edgar M. Hidalgo博士��。擔(dān)任高級(jí)超聲心動(dòng)圖技師的Leah Wright博士�,特別關(guān)注超聲心動(dòng)圖在肺動(dòng)脈高壓臨床隨訪中的應(yīng)用
去年,這兩位作者就發(fā)表了“遠(yuǎn)程機(jī)器人輔助心臟超聲的當(dāng)前應(yīng)用:臨床運(yùn)用和技術(shù)局限性的系統(tǒng)評(píng)價(jià)”�。可惜的是只查到公開發(fā)表的摘要�,不過從摘要中我們亦可看到����,在2021年3月�,研究者們從2,997篇文章中篩選出了25篇相關(guān)報(bào)道,其中10篇屬于臨床階段����,另有15篇屬于臨床前研究。在10篇臨床研究中有40%屬于心血管領(lǐng)域��,機(jī)器人輔助超聲系統(tǒng)(Robot-assisted ultrasound systems��,RAUS)運(yùn)用在了113名心血管參與者身上��,結(jié)果顯示其與傳統(tǒng)超聲相似����,但仍存在著瓣膜評(píng)估方面的局限。在大多數(shù)檢查時(shí)����,需要助手根據(jù)口頭指示調(diào)整超聲設(shè)置,從而延長(zhǎng)了檢查的時(shí)間(其中一篇提到延長(zhǎng)了40%)�。圖像質(zhì)量方面的錯(cuò)誤主要來源于圖像分辨率,因此凸顯了圖像質(zhì)量的重要性。信息傳輸方面�,低帶寬即可用于控制機(jī)器人,視頻及超聲圖像的傳輸則需要更高的帶寬��。反饋方面��,視覺(56%)和視覺與力的結(jié)合(36%)是最普遍采用的系統(tǒng)�;力反饋能夠使得超聲技師意識(shí)到施加在患者皮膚上的壓力,并讓機(jī)器人控制更加順暢����。
而到了本篇綜述,幾位作者們旨在進(jìn)一步分析用于超聲檢查的遠(yuǎn)程機(jī)器人操作系統(tǒng)的狀態(tài)�,評(píng)估它的臨床和臨床前應(yīng)用,確定其局限性�,并概述未來的方向。
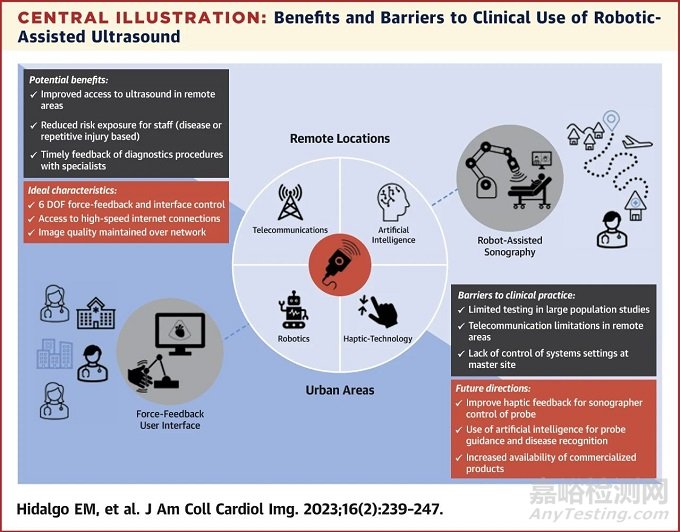
圖2 機(jī)器人輔助超聲的優(yōu)勢(shì)和壁壘�,本文的中心圖
機(jī)器人設(shè)計(jì)與功能
上圖中的有些部分大家都很熟悉了,今天重點(diǎn)來看看超聲機(jī)器人的設(shè)計(jì)特殊性��。研究者們首先就總結(jié)��,RAUS機(jī)器人可分為三類:1)專用超聲檢查而設(shè)計(jì)的機(jī)器人��;2)改裝生產(chǎn)線上的工業(yè)機(jī)器人��;3)協(xié)作機(jī)器人(Cobots)��,通常以較低的速度運(yùn)行并配備力和扭矩傳感器����,可檢測(cè)接觸和碰撞,相較工業(yè)機(jī)器人更安全的機(jī)器人�。
機(jī)器人的結(jié)構(gòu)設(shè)計(jì)如下圖3,包括由驅(qū)動(dòng)關(guān)節(jié)連接的連桿組成的單個(gè)運(yùn)動(dòng)鏈串行機(jī)制��,其中底座部分由至少2個(gè)運(yùn)動(dòng)鏈連接到移動(dòng)平臺(tái)�;或串行與并形并存的混合機(jī)制。這其中����,可用自由度(Degrees of freedom,DOF)至關(guān)重要�,通常DOF等同于機(jī)器人的驅(qū)動(dòng)關(guān)節(jié)數(shù)量,能夠決定其執(zhí)行線性和旋轉(zhuǎn)運(yùn)動(dòng)的能力��。機(jī)器人的遠(yuǎn)程控制需要一個(gè)主系統(tǒng)�,包括一個(gè)復(fù)制超聲技師手部動(dòng)作并將其傳輸?shù)綑C(jī)器人的探頭。主控制器可設(shè)計(jì)為操縱桿��、計(jì)算機(jī)鼠標(biāo)��、虛擬探針或觸覺設(shè)備。而在所報(bào)道的所有機(jī)器人中�,可根據(jù)基本功能將其分為兩類:遠(yuǎn)程定向控制(Remote orientation control)和遠(yuǎn)程運(yùn)動(dòng)定向控制(Remote motion-orientation control)。
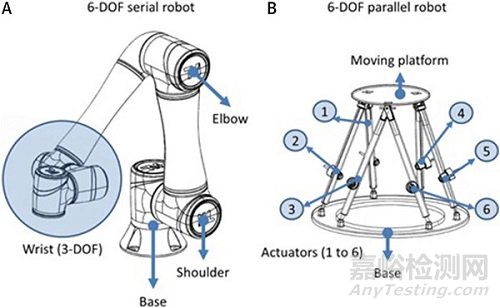
圖3 具有6-DOF的串行和并行機(jī)器人�。(A)串行機(jī)器人,由驅(qū)動(dòng)關(guān)節(jié)連接的連桿組成的單個(gè)運(yùn)動(dòng)鏈��;(B)并行機(jī)器人��,其中數(shù)字1-6指的是該機(jī)器人的6個(gè)運(yùn)動(dòng)鏈
遠(yuǎn)程定向控制
超聲技師僅控制探頭的方向��,而依靠身在現(xiàn)場(chǎng)的助手通過握持�、抬起和定位機(jī)器人將探頭定位于患者身體上,有時(shí)還需要額外的微型起重機(jī)式升降結(jié)構(gòu)來搬運(yùn)和放置機(jī)器人(想想就折騰)�。有的報(bào)道中提到,具有2-DOF�、3-DOF或4-DOF的串行結(jié)構(gòu)允許部分或完全控制探頭的方向,然而�,由于缺乏來自主站點(diǎn)的定位控制,遠(yuǎn)程檢查依賴于助手或系統(tǒng)支持����,嚴(yán)重降低了其功能。同樣地�,在一些并行系統(tǒng)中,如果機(jī)器人未固定在底座上����,則無論DOF多少,都需要一名助手來扶住機(jī)器人�。
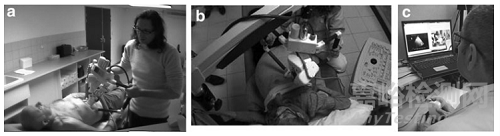
圖4 2016年的報(bào)道中,法國(guó)Maison de Sante Pluridisciplinaire的Arnaud Saccomandi博士等設(shè)計(jì)制造的遠(yuǎn)程超聲機(jī)器人系統(tǒng)
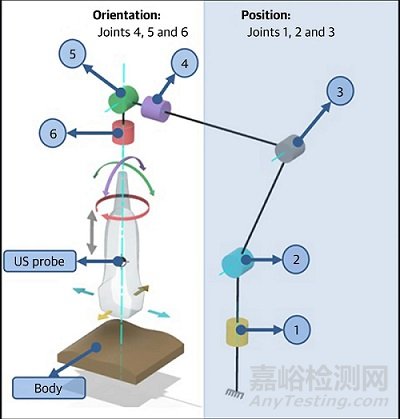
圖5 遠(yuǎn)程超聲中使用的串行機(jī)器人結(jié)構(gòu)的位置與方向��。隨著關(guān)節(jié)數(shù)量的增加�,可用于不同方向和位置的自由度增加,具有6個(gè)驅(qū)動(dòng)關(guān)節(jié)的機(jī)器人可完全控制超聲探頭的位置和方向
遠(yuǎn)程運(yùn)動(dòng)定向控制
諸如Kuka LBR iiwa(Kuka AG Robotics)或UR10(Universal Robots)類的串行機(jī)器人可實(shí)現(xiàn)完全控制探頭的位置和方向����。具有6-DOF的串行機(jī)器人使用與其手腕相關(guān)的3-DOF執(zhí)行定向運(yùn)動(dòng),并通過其他3-DOF(底座��、肩部和肘部)實(shí)現(xiàn)定位����。除了完全可控外,此類安裝在輪式平臺(tái)上的機(jī)器人提升了可用性和適用場(chǎng)景�,僅需助手或額外的機(jī)械結(jié)構(gòu)將其固定或放置在患者身上。
圖6 Kuka LBR iiwa機(jī)器人
圖7 UR10機(jī)器人(一臺(tái)售價(jià)314萬歐元左右~)
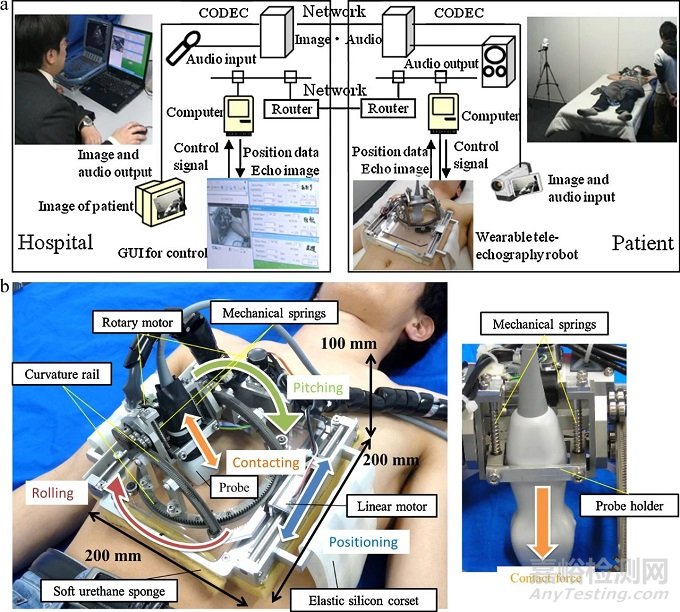
在目前所有的報(bào)道研究中����,機(jī)器人輔助超聲都需要一名助手在場(chǎng),主要負(fù)責(zé)協(xié)助患者��、設(shè)置機(jī)器人系統(tǒng)、將機(jī)器人所持的超聲探頭放置在感興趣的區(qū)域��,并按照遠(yuǎn)程指令進(jìn)行圖像優(yōu)化和采集����。串行機(jī)器人是具備4至7個(gè)自由度的遠(yuǎn)程機(jī)器人中的主要類型。此外��,有設(shè)計(jì)為“可穿戴遠(yuǎn)程超聲機(jī)器人”的4-DOF機(jī)器人����,帶有球形結(jié)構(gòu),使用緊身胸帶連接到患者胸部的4個(gè)不同區(qū)域�;也有具有線形和徑向齒形導(dǎo)軌,允許探頭方向隨著穩(wěn)定位置改變的7-DOF機(jī)器人��。
圖8 2013年的報(bào)道中�,日本研究者開發(fā)的便攜式可穿戴遠(yuǎn)程超聲機(jī)器人系統(tǒng)MicroMaxx(SonoSite Inc.)(這個(gè)SonoSite現(xiàn)在的全稱叫Fujifilm SonoSite,日本人民對(duì)機(jī)器人那可是真愛啊~)
與人工智能的接口
之前的推送中筆者也曾寫過�,人工智能AI已獲批用于超聲心動(dòng)圖的診斷,但僅適用于標(biāo)準(zhǔn)平面的二維成像�。本文的研究者們亦提到,可能可以通過幾種不同的方式來協(xié)助超聲的遠(yuǎn)程操作�,包括用于圖像平面的識(shí)別和臨床診斷的深度學(xué)習(xí)。
機(jī)器人技術(shù)的現(xiàn)狀
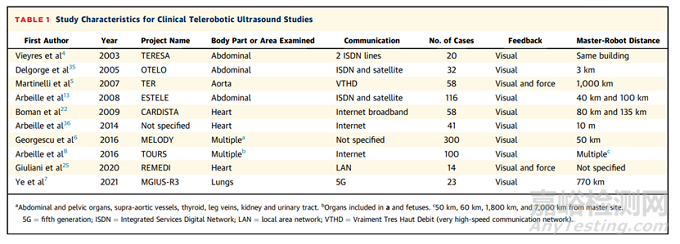
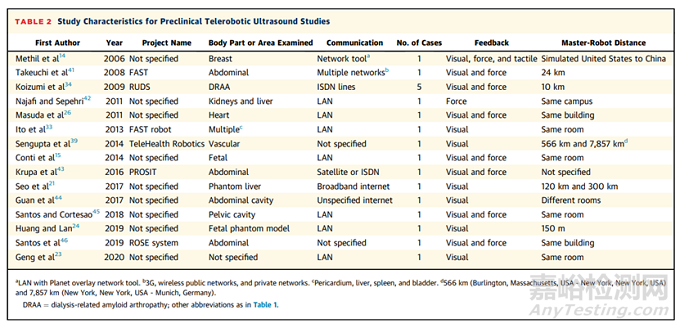
從工作臺(tái)過渡到臨床實(shí)踐��。同上文,在這一領(lǐng)域進(jìn)行的臨床研究中��,40%是心血管研究��,其余是腹部��、腎臟和盆腔(50%)����,以及肺(10%)����;90%的研究中將其與傳統(tǒng)超聲結(jié)果進(jìn)行比較,以確定所獲得的圖像和診斷的可靠性�。而在臨床前研究中,檢查類型包括:腹部��、腎臟和盆腔(53%)����、心臟和血管(13%)、胎兒(13%)����、乳房(7%)和其他(14%)����。使用機(jī)器人系統(tǒng)采集得到的經(jīng)食道超聲心動(dòng)圖的臨床前研究�,也顯示出了一定的前景,但仍在測(cè)試發(fā)展中��。注意這里的臨床前研究一般是在體外模型����,或志愿者身上進(jìn)行的。
圖9 超聲輔助機(jī)器人的臨床研究特征
圖10 超聲輔助機(jī)器人的臨床前研究特征
仍待解決的問題
COVID-19大流行期間��,機(jī)器人系統(tǒng)為相應(yīng)的隔離患者提供了遠(yuǎn)程超聲檢查的能力�。但是,現(xiàn)階段仍需要培養(yǎng)對(duì)機(jī)器人系統(tǒng)的信任��,使用過程中的患者安全性和結(jié)果準(zhǔn)確性仍然是重中之重�。未來的系統(tǒng)應(yīng)側(cè)重于改進(jìn)觸覺反饋(譬如使用Phantom Omni(3D Systems)或Omega.6(Force Dimension)等商用觸覺設(shè)備),結(jié)合人工智能及增加商業(yè)化產(chǎn)品的可用性��。
圖11 MGIUS-R3機(jī)器人(MGI Tech Co., Ltd)
文章的最后�,研究者們提到,醫(yī)療機(jī)器人是一個(gè)不斷發(fā)展的行業(yè)�,預(yù)計(jì)到2050年能達(dá)到125億美金的全球市場(chǎng)份額,他們引用的數(shù)據(jù)來源于“Medical Robots Market by Product and Service, Application, End User - Global Forecasts to 2025”。在人口老齡化的推動(dòng)下��,手術(shù)機(jī)器人和康復(fù)機(jī)器人將是兩個(gè)主要的機(jī)器人市場(chǎng)�。醫(yī)學(xué)影像機(jī)器人則會(huì)應(yīng)用于慢性病的疾病管理和篩查,然而�,使用RAUS仍需要獲得商用設(shè)備、成本效益比和臨床實(shí)用性的關(guān)鍵證據(jù)�。一個(gè)重要的臨床比較,即將發(fā)生在專家指導(dǎo)下的RAUS����,和AI引導(dǎo)的超聲新手用戶間(這真的是個(gè)很有意思的比較)��;此外����,還需要了解每年的維護(hù)成本和員工培訓(xùn)的成本。機(jī)器人技術(shù)�、人工智能和電信的結(jié)合,可能將在未來改變醫(yī)學(xué)超聲的使用方式����。
引用文獻(xiàn):
1. Edgar M. Hidalgo, Leah Wright, Mats Isaksson, et al. Current applications of robot-assisted ultrasound examination. J Am Coll Cardiol Img. 2023: 16: 239-247.
2. Norihito Koizumi, Shin’ichi Warisawa, Mitsuru Nagoshi, et al. Constraction methodology for an remote ultrasound diagnostic system. IEEE Transactions on Robotics, vol. 25, no. 3, pp. 522-538, June 2009, doi: 10.1109/TRO.2009.2019785.
3. Monica Georgescu, Arnaud Saccomandi, Bernard Baudron, et al. Remote sonography in routine clinical practice between two isolated medical center and the university hospital using a robotic arm: a 1-year study. Telemedicine and e-Health. April 2016.
4. Adriana Vilchis, Kohji Masuda, Jocelyne Troccaz, et al. Robot-based tele-echography: the TER system. Stud Health Technol Inform. 2003;95:212-7.