鼓風(fēng)機(jī)在工作時(shí),轉(zhuǎn)子上的葉片帶動(dòng)空氣高速運(yùn)動(dòng)��,將機(jī)械能轉(zhuǎn)換為氣體的壓力能和動(dòng)能��,在該過(guò)程中葉片往往會(huì)受到過(guò)大的振動(dòng)作用及不平衡力�,在應(yīng)力集中處葉片會(huì)萌生裂紋并發(fā)生斷裂��,特別是葉片所受的激勵(lì)頻率與固有頻率接近時(shí)��,裂紋尤為多�。獲得在共振工況下葉片的變形及整體應(yīng)變分布情況�,不僅可為葉片的振動(dòng)故障排除提供技術(shù)支持,也可為葉片運(yùn)行安全參數(shù)的確定提供依據(jù)����。
物體應(yīng)變的傳統(tǒng)測(cè)量方法多為接觸式測(cè)量,如最常見(jiàn)的電子應(yīng)變片法����,測(cè)量原理是將應(yīng)變片貼于葉片應(yīng)力集中處,傳感器將變形量轉(zhuǎn)化為電信號(hào)�,利用數(shù)字信號(hào)處理技術(shù),最終獲取葉片的應(yīng)變規(guī)律�,但該方法在測(cè)量時(shí)應(yīng)變片易受溫度、濕度等環(huán)境因素的影響�,測(cè)量精度相對(duì)較低。數(shù)字圖像相關(guān)(DIC)技術(shù)是數(shù)字圖像處理技術(shù)和現(xiàn)代光測(cè)力學(xué)技術(shù)相結(jié)合的產(chǎn)物�,具有非接觸、全場(chǎng)�、高精度、測(cè)量結(jié)果直觀等優(yōu)點(diǎn)�,已廣泛應(yīng)用于科學(xué)研究�、工程技術(shù)等領(lǐng)域����。解樹(shù)平等基于計(jì)算機(jī)雙目視覺(jué)原理設(shè)計(jì)制作了一種大尺寸多點(diǎn)同步三維振動(dòng)測(cè)量系統(tǒng)��,得到了坐標(biāo)隨時(shí)間的變化以及待測(cè)物體上各點(diǎn)的三維振動(dòng)信息����;劉歡建立了高速DIC諧振式疲勞裂紋擴(kuò)展試驗(yàn)系統(tǒng),得到了試樣在循環(huán)載荷下裂紋尖端的位移及應(yīng)變場(chǎng)分布特征��;孫岳用雙目視覺(jué)測(cè)量技術(shù)測(cè)量了試樣在振動(dòng)試驗(yàn)時(shí)的變形及位移��;李嘉琛等針對(duì)航空發(fā)動(dòng)機(jī)受損葉片表面噴涂散斑點(diǎn)����,采用雙目立體視覺(jué)測(cè)量技術(shù),實(shí)現(xiàn)了雙目葉片圖像的立體匹配�。
基于雙目立體視覺(jué)原理和數(shù)字圖像相關(guān)法,并結(jié)合振動(dòng)學(xué)理論��,劉越等研究人員研究了鼓風(fēng)機(jī)葉片在振動(dòng)過(guò)程中的變形及動(dòng)態(tài)應(yīng)變����,同時(shí)采用激光測(cè)振儀進(jìn)行位移測(cè)量和控制反饋����,結(jié)果可為葉片的安全運(yùn)行提供技術(shù)支持��。
1����、 三維DIC技術(shù)
三維DIC技術(shù)的基本原理是攝像機(jī)采集物體在同一時(shí)刻的散斑圖像,經(jīng)過(guò)匹配�、重建得到物體表面點(diǎn)的三維坐標(biāo),比較這些點(diǎn)在變形前�、后的三維坐
標(biāo)變化,得到物體表面點(diǎn)的位移和變形��。
1.1 雙目立體視覺(jué)原理
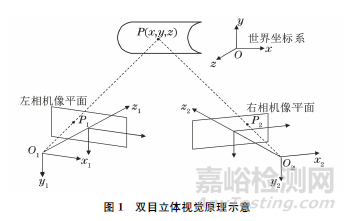
雙目立體視覺(jué)的原理如圖1所示��,用兩個(gè)互成一定角度的相機(jī)(記為左����、右相機(jī))拍攝物體表面同一塊區(qū)域,O1 和O2分別為兩相機(jī)CCD(電感耦合器件)傳感器的中心����。若以左相機(jī)為主相機(jī),右相機(jī)為從相機(jī)�,則相機(jī)三維坐標(biāo)系為O1x1y1z1����。
假設(shè)點(diǎn)P為物體表面上的測(cè)試點(diǎn)和研究點(diǎn)����,那么其坐標(biāo)既能在世界坐標(biāo)系下用點(diǎn)(x,y,z)表示��,又能在相機(jī)三維坐標(biāo)系下用點(diǎn)(x1,y1,z1)表示�。點(diǎn)P從世界坐標(biāo)系轉(zhuǎn)換為相機(jī)三維坐標(biāo)系的坐標(biāo)變換矩陣如式(1)所示。
1.2 數(shù)字圖像相關(guān)法
數(shù)字圖像相關(guān)法的關(guān)鍵是相關(guān)運(yùn)算��,即依靠預(yù)定義的相關(guān)函數(shù)完成變形前�、后圖像子區(qū)的相關(guān)計(jì)算。相關(guān)函數(shù)用來(lái)描述兩幅圖像的匹配程度��,常見(jiàn)的相關(guān)函數(shù)有直接相關(guān)函數(shù)����、協(xié)方差相關(guān)函數(shù)、標(biāo)準(zhǔn)化相關(guān)函數(shù)����、標(biāo)準(zhǔn)化協(xié)方差函數(shù)、差平方和法�、序貫相似性檢測(cè)函數(shù)等��。標(biāo)準(zhǔn)化協(xié)方差(C)函數(shù)的表達(dá)式如式(2)所示��。

2����、 試驗(yàn)原理及方法
2.1 試驗(yàn)原理
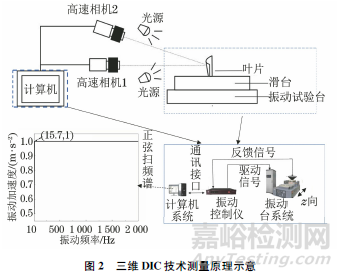
基于三維DIC技術(shù)的鼓風(fēng)機(jī)葉片動(dòng)態(tài)應(yīng)變測(cè)量是一種非接觸式的測(cè)量方法����,其測(cè)量原理如圖2所示,其中f為頻率��,A為振幅�,g為重力加速度。
由圖2可知����,三維DIC技術(shù)的測(cè)量原理為:①將葉片固定在振動(dòng)試驗(yàn)臺(tái)上,模擬葉片在葉輪上的實(shí)際安裝方式��,通過(guò)正弦掃頻振動(dòng)試驗(yàn)獲取葉片的固有頻率�,并以其第一階固有頻率為振動(dòng)激勵(lì)頻率,進(jìn)行持續(xù)的定頻振動(dòng)試驗(yàn)��;②在輔助照明系統(tǒng)的照射下,高速相機(jī)采集葉片表面的系列散斑圖像��;③ 將所采集的圖像傳輸并存儲(chǔ)到計(jì)算機(jī)內(nèi)�;④計(jì)算機(jī)對(duì)振動(dòng)試驗(yàn)前采集到葉片表面的散斑圖像和振動(dòng)試驗(yàn)過(guò)程中采集到的結(jié)果進(jìn)行相關(guān)函數(shù)運(yùn)算和相關(guān)搜索,實(shí)現(xiàn)圖像的匹配��,從而得到葉片的應(yīng)變場(chǎng)及最大應(yīng)變�。
2.2 試驗(yàn)方法
為了獲得鼓風(fēng)機(jī)葉片在第一階固有頻率共振時(shí)的變形及整體應(yīng)變分布情況,須將葉片固定于振動(dòng)試驗(yàn)臺(tái)上����,以第一階固有頻率為振動(dòng)臺(tái)激勵(lì)頻率��,按規(guī)定的量值和時(shí)間進(jìn)行振動(dòng)試驗(yàn)��。在此之前�,須采用正弦掃頻試驗(yàn)的方法獲得葉片的第一階固有頻率,其中測(cè)得葉片的第一階固有頻率為500Hz����。
首先,葉片由夾具垂直固定在電動(dòng)振動(dòng)臺(tái)和水平滑臺(tái)上��,試驗(yàn)方向?yàn)樗椒较?���;然后�,利用激光測(cè)振儀對(duì)葉片的根部進(jìn)行位移測(cè)量����,理論計(jì)算得到葉片共振時(shí)的最大位移位于葉根中心處,因此將激光測(cè)振儀的位移測(cè)量點(diǎn)設(shè)置為葉根中心處��;最后����,結(jié)合振動(dòng)控制儀實(shí)現(xiàn)振動(dòng)試驗(yàn)的閉環(huán)控制,測(cè)試面為葉背�。
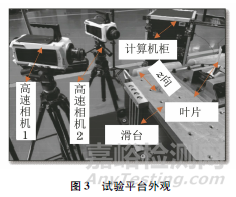
在振動(dòng)試驗(yàn)過(guò)程中,采用VIC-3D系統(tǒng)對(duì)葉背表面的應(yīng)變場(chǎng)及變形量進(jìn)行測(cè)量��,該系統(tǒng)主要包括三腳架����,兩臺(tái)發(fā)光二極管(LED)光源、標(biāo)定組件����、散斑制作工具、VIC-Snap圖像采集系統(tǒng)和VIC-3D圖像處理系統(tǒng)�。為了采集葉片的第一階固有頻率(500Hz)振動(dòng)試驗(yàn)過(guò)程中葉背表面清晰的散斑圖像,采用兩臺(tái)高速相機(jī)和兩個(gè)高速鏡頭,拍攝速率設(shè)置為4000幀/s����,分辨率為512像素×640像素,一個(gè)振動(dòng)周期可采集8幅圖像�。采用五口網(wǎng)絡(luò)交換機(jī)實(shí)現(xiàn)兩臺(tái)高速相機(jī)的圖像數(shù)據(jù)傳輸,兩臺(tái)相機(jī)設(shè)置為主從方式��,通過(guò)外部觸發(fā)裝置實(shí)現(xiàn)圖像同步采集��,搭建的試驗(yàn)平臺(tái)外觀如圖3所示��。
3����、 試驗(yàn)過(guò)程
3.1相機(jī)的標(biāo)定
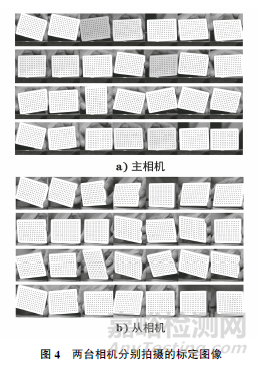
為了獲得兩臺(tái)相機(jī)的內(nèi)部參數(shù)和主��、從相機(jī)坐標(biāo)系之間的變換矩陣�,采用VIC-3D系統(tǒng)標(biāo)定組件并進(jìn)行立體標(biāo)定校正。首先�,調(diào)整相機(jī)的視野范圍及相機(jī)與葉片之間的距離,使兩臺(tái)相機(jī)的視野范圍基本上一致����,同時(shí)使葉片中心位于相機(jī)畫(huà)面十字準(zhǔn)線的中心或接近中心處;然后,調(diào)整鏡頭的焦點(diǎn)��,使相機(jī)成像盡量清晰����,根據(jù)拍攝視野和景深,選擇4mm間距的標(biāo)定板�,使視野范圍至少覆蓋70%,從而保證兩臺(tái)相機(jī)能夠識(shí)別充足有效的標(biāo)記點(diǎn)��;最后�,將校正板放在葉片安裝位置進(jìn)行拍攝,在采集圖像過(guò)程中標(biāo)定板需多次改變擺放位置��,并在x����、y、z 軸方向上旋轉(zhuǎn)約20°�,每移動(dòng)一次,兩臺(tái)相機(jī)均需通過(guò)手動(dòng)觸發(fā)進(jìn)行同步拍攝�,兩臺(tái)相機(jī)共拍攝了28組標(biāo)定圖像(見(jiàn)圖4)。
拍攝完畢后����,用VIC-3D軟件對(duì)28組標(biāo)定圖像進(jìn)行校準(zhǔn)計(jì)算����,軟件將顯示每一張標(biāo)定圖像的評(píng)估分����。兩臺(tái)相機(jī)識(shí)別標(biāo)定板上的有效數(shù)據(jù)(3個(gè)中空標(biāo)記點(diǎn))為19組,系統(tǒng)校正得分為0.013�,該結(jié)果符合不大于0.05的要求。
3.2散斑的制作與評(píng)估
數(shù)字圖像相關(guān)法是以物體表面的灰度信息為基礎(chǔ)����,根據(jù)灰度信息對(duì)變形前、后的圖像進(jìn)行匹配計(jì)算��。為了得到較高的相關(guān)系數(shù)����,提高數(shù)字圖像相關(guān)法的精度,需在試樣表面制作一幅質(zhì)量較高的散斑圖�。高質(zhì)量的散斑圖具有非周期性�、各向同性、高對(duì)比度�、散斑半徑足夠小、密度足夠高��、灰度直方圖分布均勻、承載較多的信息等特征����。
散斑制作方法主要包括噴涂法、印章法和人工點(diǎn)涂法����。鼓風(fēng)機(jī)葉背是一個(gè)凸面,印章難以貼合��,采用印章法可能造成散斑拖尾和變形��,而噴涂法受自噴漆噴嘴的結(jié)構(gòu)影響較大�,因此,采用人工點(diǎn)涂法制作黑色散斑能很好地保證散斑點(diǎn)的隨機(jī)性�。
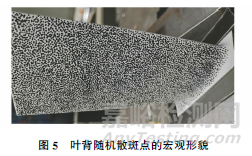
首先,對(duì)葉背表面進(jìn)行打磨處理��,并均勻噴涂一層厚度適中的白色啞光漆作為底漆����,遮蓋試樣本身的光澤和顏色,以防止在圖像采集過(guò)程中發(fā)生反光現(xiàn)象��;然后����,待白色底漆晾干后��,使用黑色碳素筆點(diǎn)涂黑色斑點(diǎn)��,保證散斑點(diǎn)的形狀盡量是大小適中的圓形����,且均勻分布于整個(gè)葉背表面(見(jiàn)圖5)����;最后,使用VIC-3D系統(tǒng)對(duì)散斑質(zhì)量進(jìn)行評(píng)估�,可得散斑半徑為0.5088mm,散斑密度為46.6%��,所測(cè)結(jié)果能夠滿足測(cè)量要求(黑白散斑各占約50%)�。
3.3振動(dòng)試驗(yàn)過(guò)程中的圖像采集
散斑圖像采集分為靜態(tài)拍攝階段和動(dòng)態(tài)拍攝階段。正弦振動(dòng)試驗(yàn)之前�,葉片處于靜止?fàn)顟B(tài),手動(dòng)觸發(fā)兩臺(tái)高速相機(jī)����,使兩臺(tái)相機(jī)同步采集一組葉背表面散斑圖像�,并將所得結(jié)果作為參考圖像����,以給出每個(gè)圖像子區(qū)中心在變形前的位移原點(diǎn)�。兩臺(tái)相機(jī)分別采集的葉背靜態(tài)散斑圖像如圖6所示。葉片振動(dòng)達(dá)到試驗(yàn)量值(500Hz)且穩(wěn)定后��,在很短的時(shí)間間隔內(nèi)(約1s)����,相機(jī)所采集的一系列葉背動(dòng)態(tài)散斑圖像約為4000幅,將散斑圖像傳輸?shù)接?jì)算機(jī)內(nèi)�,并利用VIC-3D軟件進(jìn)行計(jì)算,可以得到葉片共振時(shí)的應(yīng)變分布及最大變形�。

4、 試驗(yàn)結(jié)果與分析
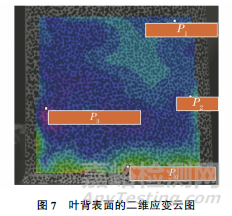
利用VIC-3D軟件對(duì)兩臺(tái)高速相機(jī)采集到的散斑圖像進(jìn)行分析處理����,并采用拉格朗日(Lagrange)算法進(jìn)行計(jì)算,得到的葉背表面二維應(yīng)變?cè)茍D(第3
幀圖片)如圖7所示�。
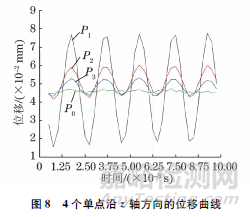
利用軟件在葉背表面的根部設(shè)置多個(gè)節(jié)點(diǎn),測(cè)得葉根處的z軸最大位移位于P0點(diǎn)����,P0點(diǎn)位于葉根中心位置附近。利用軟件在葉背的邊緣位置設(shè)置4個(gè)單點(diǎn)(P0�、P1�、P2����、P3,見(jiàn)圖7)�,并得到這4個(gè)單點(diǎn)在5個(gè)正弦振動(dòng)周期內(nèi)沿z軸方向的位移曲線(見(jiàn)圖8)。由圖8可知:葉根附近P0點(diǎn)的最大位移為0.0473mm�,而激光測(cè)振儀測(cè)得葉片根部中心位置的位移為0.0457mm。因此�,VIC-3D系統(tǒng)測(cè)量最大位移與激光測(cè)振儀測(cè)量最大位移的相對(duì)誤差約為3.5%。
利用軟件默認(rèn)的正交均方差計(jì)算標(biāo)準(zhǔn)對(duì)圖像進(jìn)行分析處理�,并對(duì)位移結(jié)果中的剛性位移進(jìn)行去除(去除剛性位移不影響應(yīng)變計(jì)算結(jié)果),可得4個(gè)單點(diǎn)在5個(gè)正弦振動(dòng)周期內(nèi)沿z軸方向的變形曲線(見(jiàn)圖9)��。由圖9可知����,P0點(diǎn)的最大變形為0.0078mm。
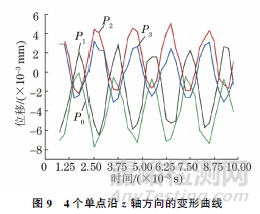
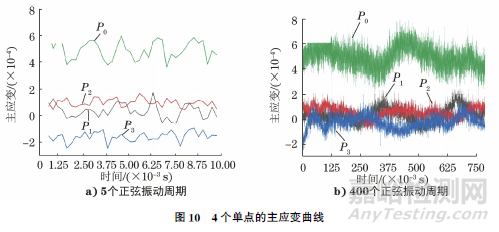
圖10為4個(gè)單點(diǎn)在5和400個(gè)正弦振動(dòng)周期內(nèi)的主應(yīng)變曲線����,其中縱坐標(biāo)表示主應(yīng)變,其正����、負(fù)值分別表示拉伸和壓縮��。由圖10可知:在正弦振動(dòng)條件下,葉片整體應(yīng)變呈現(xiàn)交變狀態(tài)����,最大應(yīng)變位于葉根處,其值為7.5256×10-4����;在4個(gè)單點(diǎn)中,位于葉根中心位置附近P0點(diǎn)的位移和應(yīng)變最大�,且形成了非彈性變形,而其余3個(gè)點(diǎn)的位移和應(yīng)變較小��,屬于彈性變形����,且隨著正弦振動(dòng)信號(hào)的激勵(lì)呈現(xiàn)交變狀態(tài),因此����,應(yīng)變計(jì)算值存在零位。采取應(yīng)變片測(cè)量方法對(duì)同批次鼓風(fēng)機(jī)葉片的應(yīng)變進(jìn)行測(cè)量��,測(cè)得的每個(gè)葉片葉根處的平均最大應(yīng)變?yōu)?.8135×10-4,VIC-3D系統(tǒng)測(cè)量葉根處最大應(yīng)變與應(yīng)變片法測(cè)量葉根處最大應(yīng)變的相對(duì)誤差約為4.0%�。
5、 結(jié)論
(1) 利用雙目立體視覺(jué)技術(shù)��,合理地布置試驗(yàn)裝置和標(biāo)定裝置�,得到了相機(jī)的內(nèi)、外部參數(shù)�,構(gòu)建了符合要求的系統(tǒng)內(nèi)部坐標(biāo)系。
(2) 采用人工點(diǎn)涂的方法制作散斑����,既簡(jiǎn)便易行,又保證了散斑點(diǎn)的隨機(jī)性�,但對(duì)于大型試樣,該方法過(guò)于耗費(fèi)時(shí)間��。
(3) 利用非接觸式全場(chǎng)位移測(cè)量系統(tǒng)��,并結(jié)合高速攝影系統(tǒng)�,實(shí)現(xiàn)鼓風(fēng)機(jī)葉片在振動(dòng)試驗(yàn)過(guò)程中的散斑圖像動(dòng)態(tài)采集和分析。葉片的最大應(yīng)變位于葉根處�,且整體應(yīng)變隨著正弦振動(dòng)的激勵(lì)呈現(xiàn)交變狀態(tài);與應(yīng)變片法測(cè)得的應(yīng)變和激光測(cè)振儀測(cè)得的位移相比�,VIC-3D系統(tǒng)測(cè)得葉片根部應(yīng)變和位移的相對(duì)誤差分別約為4.0%和3.5%。