【提要】
隨著消化內(nèi)鏡微創(chuàng)治療技術(shù)的迅速發(fā)展�����,內(nèi)鏡黏膜下剝離術(shù)已成為胃腸道早期癌的標(biāo)準(zhǔn)治療方式����,但由于操作難度大���、學(xué)習(xí)曲線長(zhǎng)����、術(shù)中出血及穿孔風(fēng)險(xiǎn)相對(duì)較高����,限制了其在世界范圍內(nèi)的推廣。目前出現(xiàn)的多種牽引技術(shù)仍存在不同程度的不足�,為此��,消化內(nèi)鏡手術(shù)機(jī)器人應(yīng)運(yùn)而生�。根據(jù)內(nèi)鏡搭載平臺(tái)的可獲得性,消化內(nèi)鏡手術(shù)機(jī)器人分為專(zhuān)用型內(nèi)鏡機(jī)器人和普通內(nèi)鏡整合型機(jī)器人����。在內(nèi)鏡黏膜下剝離術(shù)中�,已有多項(xiàng)研究顯示出消化內(nèi)鏡手術(shù)機(jī)器人較普通內(nèi)鏡的優(yōu)勢(shì)���。本文就目前常見(jiàn)的消化內(nèi)鏡手術(shù)機(jī)器人的結(jié)構(gòu)特點(diǎn)及臨床操作性能進(jìn)行介紹,以期為消化內(nèi)鏡手術(shù)機(jī)器人的發(fā)展及臨床應(yīng)用提供參考。
內(nèi)鏡黏膜下剝離術(shù)(ESD)與內(nèi)鏡黏膜切除術(shù)(EMR)相比�,具有更高的完整切除率和更低的原位復(fù)發(fā)率���,與外科手術(shù)相比����,具有更小的創(chuàng)傷性��、更低的手術(shù)相關(guān)死亡率以及更低的醫(yī)療成本����,目前已成為消化道早期癌的標(biāo)準(zhǔn)治療方式。然而�����,ESD對(duì)內(nèi)鏡操作技術(shù)要求高����,學(xué)習(xí)曲線長(zhǎng),術(shù)中多缺乏有效牽引���,黏膜下剝離視野受限����,在現(xiàn)有設(shè)備條件下術(shù)中難以形成類(lèi)似外科腹腔鏡手術(shù)中的操作三角(triangulation)���,導(dǎo)致手術(shù)出血及穿孔風(fēng)險(xiǎn)較高,因此在部分西方國(guó)家中的應(yīng)用并不廣泛,也在一定程度上限制了其在我國(guó)基層醫(yī)院的推廣應(yīng)用����。臨床醫(yī)師嘗試了多種牽引方法來(lái)解決這些困難����,包括體位牽引��、重物牽引�����、止血夾聯(lián)合彈力圈牽引���、S?O金屬夾牽引�、磁力牽引、經(jīng)皮牽引等�,它們?cè)贓SD過(guò)程中可在一定程度上改善手術(shù)剝離視野,但這些方法在牽引力方向控制���、黏膜下層張力調(diào)整、牽引區(qū)組織重新抓取等方面仍存在局限性����,且其中部分方法為有創(chuàng)性操作�����,限制了其在ESD中更廣泛的應(yīng)用。因此���,多種消化內(nèi)鏡手術(shù)機(jī)器人被開(kāi)發(fā)出來(lái)用于解決上述問(wèn)題��。
手術(shù)機(jī)器人是集醫(yī)學(xué)���、人體工程學(xué)、計(jì)算機(jī)科學(xué)、機(jī)械學(xué)等多學(xué)科于一體的醫(yī)療器械產(chǎn)品�,可從視覺(jué)、聽(tīng)覺(jué)�、觸覺(jué)等多維度為醫(yī)師手術(shù)操作提供支持,被用于超出人類(lèi)能力范圍的微創(chuàng)手術(shù)領(lǐng)域��。傳統(tǒng)外科手術(shù)機(jī)器人按臨床操控方式可分為被動(dòng)支撐型����、主動(dòng)驅(qū)動(dòng)型、協(xié)同操作型�、主從遙控型等。其中主從遙控型為目前最常見(jiàn)的機(jī)器人類(lèi)型���,即主端由手術(shù)醫(yī)師控制�,從端由機(jī)械臂控制���,主端通過(guò)從端上的視頻成像系統(tǒng)獲得術(shù)中視野圖像���。
消化內(nèi)鏡手術(shù)機(jī)器人大多數(shù)屬于主從遙控型,但由于消化內(nèi)鏡手術(shù)經(jīng)狹窄腔道進(jìn)行��,手術(shù)視野不易顯露����,且載體為柔性?xún)?nèi)鏡�����,因此其設(shè)計(jì)特點(diǎn)與達(dá)芬奇等腹腔鏡手術(shù)機(jī)器人有所不同��。我們根據(jù)內(nèi)鏡搭載平臺(tái)的可獲得性���,將消化內(nèi)鏡手術(shù)機(jī)器人分為專(zhuān)用型內(nèi)鏡機(jī)器人(需專(zhuān)用設(shè)計(jì)生產(chǎn)的內(nèi)鏡機(jī)器人)和普通內(nèi)鏡整合型機(jī)器人(可與普通內(nèi)鏡組裝使用的內(nèi)鏡機(jī)器人)(表1)。
表1 目前常見(jiàn)的消化內(nèi)鏡手術(shù)機(jī)器人匯總
|
機(jī)器人名稱(chēng) |
國(guó)家 |
分類(lèi) |
研究進(jìn)展 |
|
STRAS系統(tǒng) |
法國(guó) |
專(zhuān)用型消化 |
活體動(dòng)物實(shí)驗(yàn) |
|
內(nèi)鏡機(jī)器人 |
|
仿生柔性機(jī)器人系統(tǒng) |
中國(guó) |
專(zhuān)用型消化 |
離體動(dòng)物實(shí)驗(yàn) |
|
內(nèi)鏡機(jī)器人 |
|
Flex系統(tǒng) |
美國(guó) |
專(zhuān)用型消化 |
離體動(dòng)物實(shí)驗(yàn) |
|
內(nèi)鏡機(jī)器人 |
|
MASTER系統(tǒng) |
新加坡 |
普通消化內(nèi)鏡 |
臨床試驗(yàn) |
|
整合型機(jī)器人 |
|
TASER系統(tǒng) |
英國(guó) |
普通消化內(nèi)鏡 |
臨床試驗(yàn) |
|
整合型機(jī)器人 |
|
PETH系統(tǒng) |
韓國(guó) |
普通消化內(nèi)鏡 |
離體動(dòng)物實(shí)驗(yàn) |
|
整合型機(jī)器人 |
|
REXTER系統(tǒng) |
韓國(guó) |
普通消化內(nèi)鏡 |
離體動(dòng)物實(shí)驗(yàn) |
|
整合型機(jī)器人 |
|
EndoPicasso系統(tǒng) |
中國(guó) |
普通消化內(nèi)鏡 |
活體動(dòng)物實(shí)驗(yàn) |
|
整合型機(jī)器人 |
一�、專(zhuān)用型消化內(nèi)鏡機(jī)器人
(一)STRAS(subperichondrial transseptal)系統(tǒng)
該系統(tǒng)的第一代(STRAS V1)是由法國(guó)研究人員基于Anubiscope平臺(tái)在2013年報(bào)道的一種柔性消化內(nèi)鏡機(jī)器人。2017年Zorn等在第1代基礎(chǔ)上改進(jìn)為STRAS V2�。該系統(tǒng)內(nèi)鏡模塊主要包括1條主鏡和2個(gè)操作臂。主鏡的遠(yuǎn)端同標(biāo)準(zhǔn)內(nèi)鏡配置類(lèi)似����,包括攝像頭、照明系統(tǒng)和氣水通道���;2個(gè)柔性操作臂由主鏡頭端兩側(cè)的專(zhuān)用通道伸出,外緣有流線型保護(hù)殼��,可避免進(jìn)鏡過(guò)程中損傷周?chē)M織�����。2個(gè)操作臂伸出后可向內(nèi)彎曲形成環(huán)形,構(gòu)成手術(shù)需要的操作三角���,各系統(tǒng)協(xié)同�,共可提供10個(gè)自由度的精細(xì)操作(圖1)�。該團(tuán)隊(duì)進(jìn)行的12只動(dòng)物ESD實(shí)驗(yàn)結(jié)果表明,STRAS V2系統(tǒng)的平均剝離時(shí)間為34.25 min(4~93 min)���,剝離速度[(64.44±34.88)mm2/min]明顯高于傳統(tǒng)內(nèi)鏡[(35.95±18.93)mm2/min]���,且上述實(shí)驗(yàn)過(guò)程中STRAS V2系統(tǒng)組出現(xiàn)了上升式學(xué)習(xí)曲線,但尚未觀察到峰值�����,手術(shù)穿孔率(1/12)與使用標(biāo)準(zhǔn)內(nèi)鏡(8/16)相比顯著降低��。
該系統(tǒng)相較傳統(tǒng)消化內(nèi)鏡在進(jìn)行ESD時(shí)可實(shí)現(xiàn)操作三角�����,靈活性好�����,安全性高,且組裝簡(jiǎn)便快捷�����,兩人合作安裝僅需約10 min�����;在準(zhǔn)備階段中的內(nèi)鏡固定需由一名助手輔助放置于托架上��,之后的手術(shù)操作由單人即可完成�;操作過(guò)程中可提供3個(gè)末端執(zhí)行器,實(shí)現(xiàn)抓取�、切割和創(chuàng)面縫合功能,可有效節(jié)約手術(shù)時(shí)間����,充分滿(mǎn)足手術(shù)所需的靈巧性及精確性。但是該系統(tǒng)也存在不少局限性:第一�����,雖然該系統(tǒng)各結(jié)構(gòu)可拆分重復(fù)使用�����,但需要完全重新生產(chǎn)特殊的內(nèi)鏡���,無(wú)法與傳統(tǒng)內(nèi)鏡靈活組裝�,使得制造成本較高����;第二,該系統(tǒng)原型機(jī)柔性部分的長(zhǎng)度為65 cm����,經(jīng)肛僅能到達(dá)降結(jié)腸或經(jīng)口到達(dá)近端胃,無(wú)法完成更遠(yuǎn)部位病變的切除����;第三,該系統(tǒng)目前應(yīng)用僅為臨床前試驗(yàn)階段�,尚無(wú)臨床研究數(shù)據(jù)。
(二)仿生柔性機(jī)器人(A Bio?inspired Flexible Robot)系統(tǒng)
仿生柔性機(jī)器人系統(tǒng)由中國(guó)香港Yeung等在2014年設(shè)計(jì)發(fā)明����,其主系統(tǒng)為美國(guó)USGI醫(yī)療公司的“Transport”內(nèi)鏡平臺(tái)及2條仿人手腕的機(jī)械臂。“Transport”內(nèi)鏡平臺(tái)具有2個(gè)自由度��,可使末端固定在任何方向;具有4條工作通道��,其中2條直徑為6 mm���,供手術(shù)所需的機(jī)械臂通過(guò)���,另兩條直徑為4 mm,允許手術(shù)所需的視頻光源通過(guò)(圖2)���。該團(tuán)隊(duì)在離體豬胃組織上進(jìn)行的一項(xiàng)實(shí)驗(yàn)研究顯示���,參加實(shí)驗(yàn)的2名內(nèi)鏡醫(yī)師可順利切除75%~85%的標(biāo)記黏膜病變,并均在30 min內(nèi)完成��。
該系統(tǒng)與STRAS系統(tǒng)相比��,首先�����,機(jī)械臂均位于“Transport”內(nèi)鏡平臺(tái)套管內(nèi)��,可有效防止進(jìn)鏡過(guò)程中的組織損傷���;其次�����,執(zhí)行器末端可被套管有效固定�,增加機(jī)械臂穩(wěn)定性����,從而提高手術(shù)安全性。但該系統(tǒng)無(wú)法用于常規(guī)胃腸道檢查���,應(yīng)用該系統(tǒng)進(jìn)行ESD前需先使用普通內(nèi)鏡進(jìn)行檢查�,發(fā)現(xiàn)病變后再更換該機(jī)器人系統(tǒng)進(jìn)行病變切除�����;且受通道內(nèi)徑限制����,該系統(tǒng)所用的視頻內(nèi)鏡較小,無(wú)法觀察到機(jī)器人手臂以外的視野�����,影響手術(shù)醫(yī)師對(duì)病變及其周?chē)h(huán)境的整體認(rèn)知,增加手術(shù)風(fēng)險(xiǎn)��。目前該系統(tǒng)僅有用于體外動(dòng)物的觀察實(shí)驗(yàn)操作數(shù)據(jù)����,缺乏對(duì)照試驗(yàn)研究,實(shí)用性尚有待于證實(shí)���。
(三)Flex手術(shù)機(jī)器人系統(tǒng)(Medrobotics Flex System)
Flex手術(shù)機(jī)器人系統(tǒng)起源于美國(guó)卡耐基梅隆大學(xué)Amir等人設(shè)計(jì)的應(yīng)用于心臟外科微創(chuàng)手術(shù)的一種蛇形手術(shù)機(jī)器人系統(tǒng)���,之后改進(jìn)為Medrobotics Flex系統(tǒng),應(yīng)用于頭頸部手術(shù)�,主要適用于口咽、下咽和喉的經(jīng)口微創(chuàng)外科手術(shù)�����。第3次系統(tǒng)改進(jìn)后增加了注氣系統(tǒng)����,應(yīng)用范圍隨之也擴(kuò)大到消化道,于2017年獲得美國(guó)食品藥品監(jiān)督管理局(FDA)批準(zhǔn)應(yīng)用于消化系統(tǒng)ESD����。該系統(tǒng)的內(nèi)鏡模塊包含1條主鏡和2個(gè)直徑4 mm的外掛通道����,柔性操作臂通過(guò)外掛通道到達(dá)操作部位����,機(jī)械臂可以活動(dòng)近180°(圖3)��,并可在3D高清可視化下進(jìn)行抓取����、切割和縫合。2019年在無(wú)ESD經(jīng)驗(yàn)的醫(yī)師中進(jìn)行的一項(xiàng)隨機(jī)對(duì)照研究初步顯示了Flex手術(shù)機(jī)器人系統(tǒng)較傳統(tǒng)ESD的優(yōu)勢(shì):機(jī)器人組完全切除率達(dá)到了100%����,常規(guī)ESD組為50%(P<0.001);傳統(tǒng)ESD組較機(jī)器人組穿孔率有上升趨勢(shì)(60%比30%)����,但差異無(wú)統(tǒng)計(jì)學(xué)意義(P=0.18),不除外與樣本量少有關(guān)���;Flex組總手術(shù)時(shí)間顯著減少[(34.1±19.14)min比(88.6±31.40)min���,P=0.001]���,黏膜切開(kāi)時(shí)間也有加快的趨勢(shì)[(6.3±2.72)min比(9.2±3.42)min,P=0.06]�,黏膜下剝離時(shí)間明顯縮短[(27.8±18.38)min比(79.4±30.70)min,P=0.002]�;Flex的優(yōu)勢(shì)也體現(xiàn)在操作者主觀滿(mǎn)意度評(píng)分上,表現(xiàn)為身體疲勞度����、時(shí)間需求以及挫敗感的減少。
該系統(tǒng)相較STRAS���,同樣為需重新生產(chǎn)的特殊內(nèi)鏡�,但與STRAS不同的是�,F(xiàn)lex僅由一名操作者即可控制完成操作,且Flex的機(jī)械臂更靠外側(cè)��,未設(shè)置保護(hù)殼�����,從專(zhuān)用外化套管中伸出��,其活動(dòng)不再受末端殼的限制,靈活度更高���。但Flex系統(tǒng)仍存在局限性���。首先,它仍然需要使用特制直腸端口進(jìn)行適當(dāng)?shù)拿芊?�,以維持充氣���,且機(jī)器人內(nèi)窺鏡的工作長(zhǎng)度相對(duì)較短�����,僅允許切除距離肛門(mén)邊緣25 cm及以?xún)?nèi)的病變;其次����,該系統(tǒng)雖已獲得FDA批準(zhǔn),但目前暫無(wú)活體動(dòng)物及臨床研究數(shù)據(jù)�。
二、普通消化內(nèi)鏡整合型機(jī)器人
(一)主從式腔道內(nèi)窺鏡機(jī)器人(Master and Slave Transluminal Endoscopic Robot�,MASTER)系統(tǒng)
MASTER是2008年由新加坡Phee等設(shè)計(jì)發(fā)明的一種消化內(nèi)鏡機(jī)器人系統(tǒng),其主系統(tǒng)安裝在雙通道治療內(nèi)鏡上�����。由于第1代MASTER從屬機(jī)械臂為多關(guān)節(jié)鉸鏈?zhǔn)剑杂啥仁芟?����,為增加靈活度��,仿人體前臂改進(jìn)的二代MASTER操作臂由串聯(lián)式改為并聯(lián)式����,自由度顯著增加。其末端執(zhí)行器包括一個(gè) “L”型鉤刀和一個(gè)抓鉗(圖4)����,抓鉗臂負(fù)責(zé)提起病變組織,輔助暴露手術(shù)視野��,鉤刀操作臂完成黏膜下病變剝離���。該系統(tǒng)需2名操作員操作����,一名內(nèi)鏡醫(yī)師負(fù)責(zé)在操作臺(tái)通過(guò)手柄控制機(jī)械臂���,另一名助手醫(yī)師負(fù)責(zé)抓持內(nèi)鏡���。Ho等于2010年進(jìn)行的一項(xiàng)動(dòng)物實(shí)驗(yàn)顯示�,MASTER可有效提高ESD的可行性和安全性��。Phee等在2012年進(jìn)行的一項(xiàng)多中心前瞻性研究顯示���,MASTER可有效提高復(fù)雜內(nèi)鏡手術(shù)的可行性和安全性����。該研究納入了3例來(lái)自印度中心�、2例來(lái)自香港中心的早期胃癌患者,結(jié)果顯示�,研究中所有患者成功完成MASTER輔助下ESD�,平均黏膜下剝離時(shí)間為18.6 min;術(shù)中僅出現(xiàn)1例出血�����,經(jīng)止血治療于術(shù)后第3天好轉(zhuǎn)出院����;病變切緣均陰性��;術(shù)后為期30 d的隨訪均未觀察到任何并發(fā)癥����,內(nèi)鏡復(fù)查未發(fā)現(xiàn)殘留或復(fù)發(fā)的腫瘤����。
首先,MASTER與前文中提及的3種內(nèi)鏡機(jī)器人系統(tǒng)不同���,它可與普通內(nèi)鏡組裝使用���,無(wú)需重新生產(chǎn)新型內(nèi)鏡;其次�,MASTER二代系統(tǒng)在柔性?xún)?nèi)鏡檢查中模仿人手臂改進(jìn)了機(jī)械臂,提高了術(shù)中操作的自由度����,能更加充分地暴露手術(shù)視野,有效降低出血��、穿孔等常見(jiàn)并發(fā)癥的發(fā)生率��。但該系統(tǒng)也存在部分局限性�,術(shù)中需要機(jī)械臂提拉����、切割功能以外的操作時(shí)���,需從患者身上取出機(jī)器人鏡身�����,更換普通內(nèi)鏡進(jìn)行操作����。
(二)經(jīng)肛內(nèi)鏡黏膜下切除(Trans?Anal Submucosal Endoscopic Resection��,TASER)系統(tǒng)
TAESR技術(shù)起源于經(jīng)肛門(mén)內(nèi)鏡微創(chuàng)手術(shù) (trans?anal endoscopic micro?surgery��,TEMS)���, 于2013年由英國(guó)Saunders等報(bào)道�,并應(yīng)用于臨床����。該系統(tǒng)由GelPoint平臺(tái)��、1條治療內(nèi)鏡(GIFH260)、2個(gè)腹腔鏡器械組成(圖5)�����。平臺(tái)提供3個(gè)密封的直腸入口����,內(nèi)鏡提供手術(shù)視野、氣體注入和切除或止血設(shè)備����,腹腔鏡器械負(fù)責(zé)進(jìn)行組織回收、縫合�、夾閉或切割。Tsiamoulos等進(jìn)行的一項(xiàng)單中心觀察隊(duì)列研究中�����,該平臺(tái)應(yīng)用于17例常規(guī)內(nèi)鏡治療失敗的復(fù)雜直腸息肉樣病變患者(平均直徑88 mm)����,16例(94%)患者完全切除,平均切除時(shí)間為185 min(65~480 min)�����,術(shù)后均無(wú)明顯穿孔,僅有1例患者術(shù)后有輕微出血�����。
該系統(tǒng)組裝簡(jiǎn)單����,設(shè)備輕巧,易于移動(dòng)���,實(shí)用性強(qiáng)���。根據(jù)上述試驗(yàn)研究結(jié)果,TASER在未來(lái)有可能成為普通內(nèi)鏡下難以治療的復(fù)雜直腸息肉的新型治療方式���;但該系統(tǒng)目前的應(yīng)用僅限于直腸����,一定程度上限制了它的應(yīng)用及推廣���。
(三)便攜式內(nèi)鏡機(jī)器人(Portable Endoscopic Tool Handler��,PETH)系統(tǒng)
PETH系統(tǒng)于2019年由韓國(guó)Hwang等設(shè)計(jì)提出���。PETH主系統(tǒng)由普通內(nèi)鏡與1條或2條機(jī)械臂構(gòu)成,機(jī)械臂為外掛式��,可以實(shí)現(xiàn)兩個(gè)獨(dú)立的每個(gè)方向超過(guò)100°的彎曲���,使機(jī)械臂末端能夠到達(dá)內(nèi)鏡可視范圍內(nèi)的任何點(diǎn)�,實(shí)現(xiàn)多方向牽引和抓?����。▓D6)�。每個(gè)機(jī)械臂的運(yùn)動(dòng)都由操作主手控制,主手操作方向與機(jī)械臂運(yùn)動(dòng)方向同步���。該團(tuán)隊(duì)進(jìn)行的一項(xiàng)在離體豬胃模型上的體外實(shí)驗(yàn)證實(shí)�,PETH在牽引����、張力控制和抓取方面均具有明顯優(yōu)勢(shì);同時(shí)該實(shí)驗(yàn)數(shù)據(jù)顯示���,PETH?ESD的黏膜下剝離時(shí)間及總手術(shù)時(shí)間均明顯短于傳統(tǒng)ESD(前者P=0.003�,后者P=0.011);傳統(tǒng)剝離中視野不佳的時(shí)間比率為20%����,PETH組為0%,充分顯示出PETH對(duì)手術(shù)視野暴露的優(yōu)勢(shì)����;PETH?ESD的解剖速度明顯比傳統(tǒng)ESD快2.5倍以上(P<0.001);PETH?ESD中病例均實(shí)現(xiàn)整塊切除且無(wú)穿孔發(fā)生���。
PETH系統(tǒng)與傳統(tǒng)內(nèi)鏡相比�����,具有與MASTER類(lèi)似的優(yōu)點(diǎn)��。PETH與MASTER相比��,也存在諸多優(yōu)勢(shì):其一��,PETH可與普通單通道內(nèi)鏡組裝使用�,且組裝更容易���,僅需約5 min�����,而MASTER機(jī)械臂與內(nèi)鏡的組裝需2 h��;其二�,PETH可以根據(jù)內(nèi)鏡手術(shù)類(lèi)型�,靈活調(diào)整連接到標(biāo)準(zhǔn)內(nèi)鏡上的機(jī)械臂數(shù)量和方向;其三���,PETH機(jī)械臂的轉(zhuǎn)動(dòng)角度與控制其運(yùn)動(dòng)的拇指棒主手的傾斜度成正比����,增加了內(nèi)鏡醫(yī)師對(duì)機(jī)械臂的操控性及操作靈活性����;其四,PETH開(kāi)發(fā)了圖形模擬器�����,可顯示機(jī)器人臂在胃腸道中的位置�,這對(duì)輔助完成機(jī)器人臂在內(nèi)鏡視野之外的操作非常有幫助�����。
但PETH系統(tǒng)由于附加機(jī)械臂�,使得內(nèi)鏡直徑增大���,約為15 mm���,而傳統(tǒng)內(nèi)鏡直徑為9~13 mm,降低了患者內(nèi)鏡下治療的耐受性�。Hwang等進(jìn)行的離體實(shí)驗(yàn)數(shù)據(jù)顯示,與傳統(tǒng)ESD相比����,在PETH?ESD中,標(biāo)本的切除面積較大(P=0.022)����;切除標(biāo)本的總黏膜下厚度稍大(總厚度P=0.448,黏膜下厚度P=0.118)�。筆者認(rèn)為,這可能與手術(shù)醫(yī)師操縱機(jī)械臂時(shí)缺乏壓力感受有關(guān)�����,換言之,可能與機(jī)械臂尖端缺乏壓力監(jiān)測(cè)有關(guān)��。另外����,該系統(tǒng)目前僅有體外豬胃模型研究數(shù)據(jù),進(jìn)入臨床使用支持證據(jù)尚不足���。
(四)基于旋轉(zhuǎn)關(guān)節(jié)的輔助內(nèi)鏡機(jī)器人(Revolute Joint?Based Auxiliary Transluminal Endoscopic Robot,REXTER)系統(tǒng)
REXTER是一種基于旋轉(zhuǎn)關(guān)節(jié)的���、可拆卸的輔助內(nèi)鏡機(jī)器人系統(tǒng)�����,2019年由韓國(guó)Kim等設(shè)計(jì)發(fā)明����。該系統(tǒng)機(jī)械臂呈串聯(lián)式安裝在通用內(nèi)鏡(GIF?2T240)上(圖7)�。該系統(tǒng)的機(jī)械臂有2個(gè)連桿(每個(gè)連桿15 mm),并有4個(gè)自由度來(lái)完成手術(shù)所需的復(fù)雜操作��。Kim等進(jìn)行的一項(xiàng)體外實(shí)驗(yàn)證實(shí)�,ESD操作經(jīng)驗(yàn)豐富組中,使用傳統(tǒng)方法及機(jī)器人輔助方法的平均手術(shù)時(shí)間差異無(wú)統(tǒng)計(jì)學(xué)意義��,ESD操作新手組亦如此�����;但兩組參加實(shí)驗(yàn)人員均顯示�����,使用機(jī)器人輔助的方法���,操作時(shí)間均隨著實(shí)驗(yàn)的進(jìn)行而縮短�,且在ESD操作新手組中���,手術(shù)穿孔率明顯降低(1/10比6/10)�,手術(shù)安全性明顯提高��。
REXTER與TASER�、PETH類(lèi)似,均可根據(jù)手術(shù)需要�,靈活地與普通內(nèi)鏡進(jìn)行組裝或拆卸,系統(tǒng)組裝簡(jiǎn)單�����,使用便捷。但與MASTER��、TASER及PETH相比�,該系統(tǒng)存在一定的不足,其僅能在術(shù)中進(jìn)行組織牽拉��,無(wú)法實(shí)現(xiàn)切開(kāi)���、縫合、術(shù)中止血等操作�,不利于術(shù)中并發(fā)癥的處理����。且該系統(tǒng)目前僅在離體動(dòng)物模型中顯示出ESD操作經(jīng)驗(yàn)豐富者與ESD操作新手在手術(shù)安全性和效率方面的差異���,仍需更多的實(shí)驗(yàn)數(shù)據(jù)支持該系統(tǒng)的臨床推廣。
三�����、國(guó)內(nèi)消化內(nèi)鏡手術(shù)機(jī)器人
目前我國(guó)消化內(nèi)鏡手術(shù)機(jī)器人的發(fā)展尚處于起步階段��。2002年王黨校等設(shè)計(jì)出一款用于纖維內(nèi)鏡的機(jī)器人系統(tǒng)�,但該系統(tǒng)主要用于控制胃鏡手柄���,較難應(yīng)用于ESD等治療操作�。2016年楊云生教授團(tuán)隊(duì)自主研發(fā)出軟式內(nèi)鏡機(jī)器人YunSRobot系統(tǒng)�,該系統(tǒng)可與普通消化內(nèi)鏡整合使用,且為主從式操控型���,內(nèi)鏡醫(yī)師通過(guò)主端手柄實(shí)現(xiàn)對(duì)從端鏡體輸送機(jī)械臂及鏡體操作機(jī)械臂的控制��。2018年進(jìn)行的一項(xiàng)研究顯示����,YunSRobot系統(tǒng)可在視野清晰度符合操作要求的前提下實(shí)現(xiàn)對(duì)人體胃鏡檢查的全部操作���,雖然操作時(shí)間較普通內(nèi)鏡有所延長(zhǎng)�,但數(shù)據(jù)顯示出機(jī)器人系統(tǒng)良好的學(xué)習(xí)曲線���,且由于樣本量較小�����,尚未觀察到峰值�。2018年,山東大學(xué)齊魯醫(yī)院李延青教授團(tuán)隊(duì)聯(lián)合深圳羅伯醫(yī)療公司(ROBO Medical)研發(fā)的EndoPicasso機(jī)器人系統(tǒng)(圖8)首次在第三屆世界醫(yī)療機(jī)器人大會(huì)上亮相����,其同樣為可與普通消化內(nèi)鏡整合使用的主從式操控型系統(tǒng),該系統(tǒng)為外掛式機(jī)械臂�,可與普通內(nèi)鏡整合使用,手術(shù)柔性臂直徑為2.5 mm����,具有4個(gè)自由度,目前已完成離體和活體動(dòng)物ESD實(shí)驗(yàn)�,均顯示其可以顯著縮短剝離時(shí)間���,減少肌層損傷等并發(fā)癥。
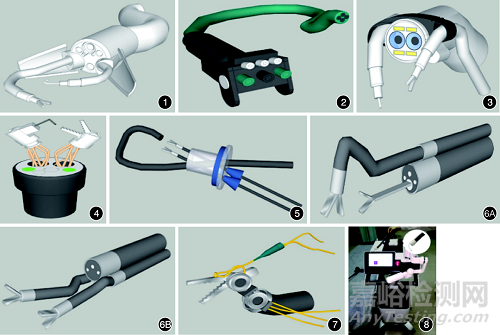
圖1 STRAS機(jī)器人系統(tǒng)模型圖 圖2 仿生柔性機(jī)器人系統(tǒng)模型圖 圖3 Flex手術(shù)機(jī)器人系統(tǒng)模型圖 圖4 主從式腔道內(nèi)窺鏡機(jī)器人(MASTER)系統(tǒng)模型圖 圖5 經(jīng)肛內(nèi)鏡黏膜下切除(TASER)系統(tǒng)模型圖 圖6 便攜式內(nèi)鏡機(jī)器人(PETH)系統(tǒng)模型圖 6A:單臂��;6B:雙臂圖7基于旋轉(zhuǎn)關(guān)節(jié)的輔助內(nèi)鏡機(jī)器人(REXTER)系統(tǒng)模型圖 圖8EndoPicasso機(jī)器人系統(tǒng)實(shí)物圖
四���、小結(jié)
隨著我國(guó)消化道早期癌檢出率逐年提高�,未來(lái)對(duì)ESD的需求將進(jìn)一步增加。目前上述的諸多實(shí)驗(yàn)研究數(shù)據(jù)均表明���,消化內(nèi)鏡機(jī)器人技術(shù)的引入����,能夠大幅提升ESD手術(shù)操作的精確度與穩(wěn)定性���,降低操作難度����,改善學(xué)習(xí)曲線�����,提高手術(shù)質(zhì)量����,引領(lǐng)微創(chuàng)內(nèi)鏡手術(shù)技術(shù)的變革。未來(lái)在物聯(lián)網(wǎng)技術(shù)�、智能醫(yī)療、基于人工智能的視頻分析��、遠(yuǎn)程監(jiān)測(cè)技術(shù)的綜合應(yīng)用下,人機(jī)交互反饋信息得以豐富���,內(nèi)鏡醫(yī)師對(duì)手術(shù)機(jī)器人的操作精度和臨場(chǎng)感將會(huì)進(jìn)一步提升����,從而加速ESD技術(shù)在世界范圍內(nèi)的推廣應(yīng)用并造福廣大患者����。

