【摘要】
目的:初步評(píng)估新型柔性、雙臂、主從操作的消化內(nèi)鏡微創(chuàng)手術(shù)機(jī)器人——DREAMS(dual?arm robotic endoscopic assistant for minimally invasive surgery)系統(tǒng)輔助內(nèi)鏡黏膜下剝離術(shù)(endoscopic submucosal dissection�����,ESD)的可行性����。
方法:選用新鮮剝離的健康豬胃作為模型����,設(shè)計(jì)不同大小的類圓形病變10個(gè)(胃竇和胃體各5個(gè)),由2名內(nèi)鏡醫(yī)生(甲和乙)獨(dú)自完成內(nèi)鏡下剝離操作�����,觀察DREAMS系統(tǒng)輔助下的剝離效果(黏膜下剝離速度)��、安全性(肌層損傷�����、穿孔發(fā)生率)和操作性能(抓取效率:用每個(gè)病變需要夾鉗夾取的次數(shù)來評(píng)估)��。
結(jié)果:10例機(jī)器人輔助下的ESD均順利完成��,10個(gè)病變均實(shí)現(xiàn)整塊切除,病變直徑(22.34±2.39)mm��,剝離時(shí)間(15.00±8.90)min��,剝離速度(141.79±79.12)mm2/min����,平均每個(gè)病變需要夾取4.2次,共有4例(40.0%)ESD出現(xiàn)肌層損傷��,無一例穿孔發(fā)生��。
結(jié)論:初步動(dòng)物實(shí)驗(yàn)結(jié)果顯示��,DREAMS系統(tǒng)輔助ESD安全�����、可行�����。
與內(nèi)鏡黏膜切除術(shù)(EMR)相比�����,內(nèi)鏡黏膜下剝離術(shù)(ESD)能夠切除直徑>2 cm的病灶,且具有更高的完整切除率和較低的原位復(fù)發(fā)率�����,已成為早期胃腸道腫瘤的標(biāo)準(zhǔn)治療方式��。然而����,應(yīng)用傳統(tǒng)單通道內(nèi)鏡進(jìn)行ESD手術(shù)難以形成“操作三角”�����,不能為ESD提供充足的手術(shù)視野��;同時(shí)����,現(xiàn)有手術(shù)器械自由度較少,使得ESD技術(shù)要求高�����、手術(shù)時(shí)間長(zhǎng)�����,存在較高的出血和穿孔風(fēng)險(xiǎn)。以上因素限制了ESD在世界范圍內(nèi)的大規(guī)模推廣和應(yīng)用��。
充分的視野暴露與精巧�����、靈活的手術(shù)器械是高效����、安全ESD手術(shù)的關(guān)鍵。良好的對(duì)抗?fàn)恳κ且曇氨┞兜挠行侄?���。近年來,體位牽引�����、金屬夾聯(lián)合絲線牽引����、金屬夾聯(lián)合彈力圈牽引等多種方式被應(yīng)用于臨床,這些輔助牽引方法在一定程度上改善了黏膜下剝離視野����,但是其在牽引力大小和方向的控制�����、黏膜下層張力的調(diào)節(jié)和牽引位置的改變等方面仍存在局限性�����。隨著人工智能和高端醫(yī)療器械的發(fā)展����,將機(jī)器人技術(shù)與微創(chuàng)手術(shù)技術(shù)相結(jié)合是解決上述問題的潛在方法��。通過模擬外科手術(shù)實(shí)現(xiàn)“雙臂”操作����,消化內(nèi)鏡機(jī)器人一方面可以提供高效的對(duì)抗?fàn)恳?���,另一方面多自由度、精?zhǔn)控制的手術(shù)器械提高了手術(shù)操作的靈活性�����,保證了手術(shù)質(zhì)量,有望降低ESD的技術(shù)要求�����。
近年來��,多種消化內(nèi)鏡機(jī)器人被研發(fā)出來����,但是仍存在一些問題,如尺寸較大��、技術(shù)壟斷等����。針對(duì)這種情況,本中心自主研發(fā)了一種新型柔性�����、雙臂��、主從操作的消化內(nèi)鏡微創(chuàng)手術(shù)機(jī)器人——DREAMS(dual?arm robotic endoscopic assistant for minimally invasive surgery)系統(tǒng)�����,對(duì)其進(jìn)行了充分的應(yīng)用前測(cè)試,并初步評(píng)估了其在離體豬胃ESD術(shù)中的剝離效果�����、安全性和操作性能��。
材料與方法
一��、DREAMS系統(tǒng)總體描述
DREAMS系統(tǒng)是一種柔性����、雙臂、主從操作的內(nèi)鏡機(jī)器人系統(tǒng)����,由柔性雙通道內(nèi)鏡����、柔性手術(shù)執(zhí)行器(從手)、操作主手��、六自由度定位臂和控制系統(tǒng)組成(圖1)��。整個(gè)系統(tǒng)均為自主研發(fā)����,針對(duì)消化道狹長(zhǎng)����、多曲的特點(diǎn)��,結(jié)合消化內(nèi)鏡手術(shù)操作要求和醫(yī)生的操作習(xí)慣進(jìn)行設(shè)計(jì)��,進(jìn)入人體部分尺寸小�����、長(zhǎng)度大�����,與軟組織交互部分剛?cè)嵯酀?jì)����,兼具安全性和有效性。
注:①為柔性雙通道內(nèi)鏡��;②為柔性手術(shù)執(zhí)行器��;③為操作主手����;④為六自由度定位臂
圖1 DREAMS(dual?arm robotic endoscopic assistant for minimally invasive surgery)系統(tǒng)整機(jī)展示
二�����、機(jī)械結(jié)構(gòu)
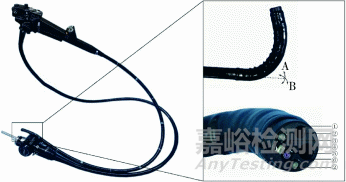
1.柔性雙通道內(nèi)鏡:柔性雙通道內(nèi)鏡具有成像�����、吸引��、副送水�����、充氣����、沖洗鏡頭的功能����,通過操作手輪�����,可實(shí)現(xiàn)蛇管上、下�����、左��、右四個(gè)方向的擺動(dòng)����,擺動(dòng)角度可達(dá)上210°、下90°��、左100°�����、右100°��。前端部外徑11.8 mm����,集成有雙工作通道、超細(xì)雙照明光纖�����、微型CCD成像鏡頭、水氣噴嘴和副送水口��,其中工作通道分別為3.8 mm 和2.8 mm����,兼具尺寸小、工作通道大的特點(diǎn)����。插入部有效工作長(zhǎng)度>1 030 mm,可以覆蓋食管��、胃����、結(jié)腸。圖2為柔性雙通道內(nèi)鏡實(shí)物圖�����。
注:A指示的是上下擺動(dòng)�����;B指示的是左右擺動(dòng)��;①為內(nèi)徑2.8 mm工作通道�����;②為超細(xì)雙照明光纖��;③為副送水口�����;④為水氣噴嘴�����;⑤微型CCD成像鏡頭�����;⑥為內(nèi)徑3.8 mm工作通道
圖2 柔性雙通道內(nèi)鏡組成及功能展示
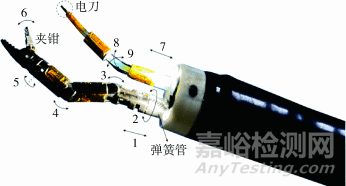
2.柔性手術(shù)執(zhí)行器:柔性手術(shù)執(zhí)行器即從手(圖3)����,分為左手和右手。左手為夾鉗����,集成于柔性操作臂末端�����。右手為電刀����,集成于柔性并聯(lián)腕關(guān)節(jié)末端�����。
注:1~6為左從手各部件��,其中1為軸向平移�����,2為旋轉(zhuǎn)����,3為外展,4為內(nèi)收�����,5為俯仰,6為夾鉗開合��;7~9為右從手各部件�����,其中7為前進(jìn)����,8為偏轉(zhuǎn)�����,9為俯仰
圖3 柔性手術(shù)執(zhí)行器組成及功能展示
柔性操作臂(含末端夾鉗)共由五個(gè)連桿串聯(lián)構(gòu)成����,形成6個(gè)自由度:軸向平移、旋轉(zhuǎn)��、外展����、內(nèi)收、俯仰(提拉)����、夾鉗開合�����。柔性操作臂的軸向平移和旋轉(zhuǎn)自由度是通過長(zhǎng)距離彈簧管從內(nèi)鏡工作通道入口處傳遞至柔性操作臂基座實(shí)現(xiàn)的�����,平移范圍-55~55 mm��,可以覆蓋病變組織的直徑為20~30 mm����。柔性操作臂的外展和內(nèi)收自由度采用繩索驅(qū)動(dòng)的方式實(shí)現(xiàn)��,運(yùn)動(dòng)范圍均為0~60°����。通過外展和內(nèi)收自由度可形成操作三角,避免柔性操作臂連桿遮擋黏膜下視野����。柔性操作臂的俯仰自由度旋轉(zhuǎn)軸與外展/內(nèi)收自由度旋轉(zhuǎn)軸垂直,其運(yùn)動(dòng)范圍為-60~60°�����,用來實(shí)現(xiàn)對(duì)黏膜的提拉,最大提拉高度約為17 mm��。末端夾鉗采用單邊開合的方式����,從而減小夾鉗開合與外展/內(nèi)收自由度的耦合����。柔性操作臂的外徑為3.5 mm,可以順利通過內(nèi)徑3.8 mm的內(nèi)鏡工作通道��。
柔性并聯(lián)腕關(guān)節(jié)采用并聯(lián)式結(jié)構(gòu)��,利用四根記憶合金鎳鈦絲連接基座和末端連桿形成2個(gè)自由度:偏轉(zhuǎn)和俯仰����,最大彎曲角度均可達(dá)90°。電刀集成于柔性并聯(lián)腕關(guān)節(jié)末端連桿上��,其到柔性并聯(lián)腕關(guān)節(jié)旋轉(zhuǎn)軸的直線距離約為14 mm����,在偏轉(zhuǎn)自由度作用下����,電刀最大可覆蓋橫向28 mm的病變組織��。為了增大電刀的縱向覆蓋范圍��,柔性并聯(lián)腕關(guān)節(jié)還具有軸向平移自由度����,其運(yùn)動(dòng)范圍為-39~39 mm。柔性并聯(lián)腕關(guān)節(jié)的外徑為2.5 mm��,可以順利通過內(nèi)徑2.8 mm的內(nèi)鏡工作通道�����。
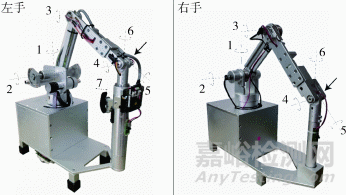
3.操作主手:操作主手為串聯(lián)式結(jié)構(gòu)�����,分為左手和右手�����,分別控制左右從手的運(yùn)動(dòng)。操作主手具有3個(gè)位置自由度和3個(gè)姿態(tài)自由度(圖4)����,3個(gè)位置自由度用于控制從手的空間位置,3個(gè)姿態(tài)自由度用于控制從手的姿態(tài)�����,此外�����,左主手還具有第7個(gè)自由度����,用于控制左從手末端夾鉗的開合��。
注:1~3為位置自由度����;4~6為姿態(tài)自由度;7用于控制左從手末端夾鉗開合
圖4 操作主手組成及功能展示
4.六自由度定位臂:六自由度定位臂用于承載雙通道內(nèi)鏡及柔性手術(shù)執(zhí)行器����,其運(yùn)動(dòng)可以利用控制面板實(shí)現(xiàn),也可以通過自由拖拽實(shí)現(xiàn)����。與操作主手類似�����,六自由度定位臂為串聯(lián)式結(jié)構(gòu)�����,具有3個(gè)位置自由度和3個(gè)姿態(tài)自由度(圖5)����。

注:1~3為位置自由度��;4~6為姿態(tài)自由度
圖5 六自由度定位臂組成及功能展示
三��、控制系統(tǒng)
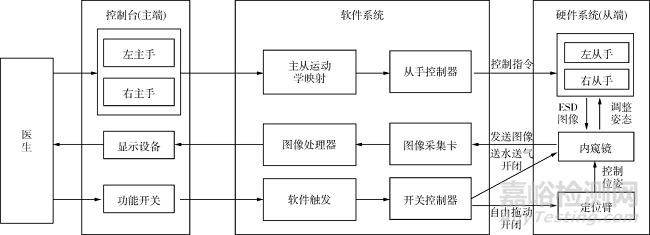
消化內(nèi)鏡微創(chuàng)手術(shù)機(jī)器人采用主從操作的控制方式�����,其控制系統(tǒng)主要包括三個(gè)部分:控制臺(tái)(主端)��、軟件系統(tǒng)和從端硬件系統(tǒng)��。主端控制臺(tái)包括左右主手、顯示設(shè)備和若干功能開關(guān)�����。首先����,內(nèi)鏡通過圖像采集卡和圖像處理器將目標(biāo)圖像反饋至控制臺(tái)的顯示設(shè)備。然后��,醫(yī)生根據(jù)內(nèi)鏡反饋的圖像控制定位臂自由拖動(dòng)的功能開關(guān)��,調(diào)整定位臂末端執(zhí)行器(內(nèi)鏡)的位置和姿態(tài)��,使其定位到目標(biāo)組織�����。之后�����,醫(yī)生通過操縱主手控制從手運(yùn)動(dòng)����。此時(shí),主手的控制指令發(fā)送至軟件系統(tǒng)��,在完成主從映射之后��,從手各關(guān)節(jié)的控制指令發(fā)送至從手控制器(Galil��,DMC4183)����,從而實(shí)現(xiàn)對(duì)從手的控制。此外��,在ESD手術(shù)過程中����,當(dāng)出現(xiàn)煙霧、出血等情況時(shí)����,醫(yī)生可以通過控制臺(tái)的功能開關(guān)打開內(nèi)鏡的送水、送氣����、吸引功能,快速實(shí)現(xiàn)對(duì)鏡頭的清洗��,提高內(nèi)鏡視野的清晰度。機(jī)器人系統(tǒng)的工作模式如圖6所示��。
注:ESD指內(nèi)鏡黏膜下剝離術(shù)
圖6 機(jī)器人系統(tǒng)工作示意圖
四��、DREAMS系統(tǒng)應(yīng)用前測(cè)試
1.生物相容性測(cè)試:DREAMS系統(tǒng)與人體接觸部分均采用生物相容性良好的材料制備��。為了保證DREAMS系統(tǒng)的生物安全性����,在應(yīng)用前對(duì)其接觸人體部分進(jìn)行了生物相容性測(cè)試。DREAMS系統(tǒng)接觸人體的部分主要包含柔性雙通道內(nèi)鏡的插入部和柔性手術(shù)執(zhí)行器的插入部����。參考標(biāo)準(zhǔn)ISO 10993—1:2018,根據(jù)其接觸人體的性質(zhì)和時(shí)間��,選擇細(xì)胞毒性����、皮內(nèi)反應(yīng)和皮膚致敏。按照GB/T 16886.10—2017中規(guī)定的試驗(yàn)方法進(jìn)行取樣�����、測(cè)試�����。
2.電氣安全測(cè)試:為了保證DREAMS系統(tǒng)的電氣安全性�����,在應(yīng)用前對(duì)整機(jī)進(jìn)行了電氣安全測(cè)試����。依據(jù)GB 9706.1—2007,開展接地電阻�����、漏電流和電介質(zhì)強(qiáng)度測(cè)試����。
五、動(dòng)物實(shí)驗(yàn)
1.離體豬胃模型:選用新鮮剝離的健康豬的胃作為模型�����。為了保證胃壁的柔軟和導(dǎo)電性��,研究者將豬胃保存于室溫環(huán)境中�����,并用生理鹽水沖洗。為了充分驗(yàn)證機(jī)器人的可操作性�����,研究者設(shè)計(jì)不同大小�����、不同部位的類圓形病變10個(gè):5個(gè)病變位于胃竇��,直徑為15~20 mm����,按實(shí)驗(yàn)先后順序編號(hào)1~5;5個(gè)病變位于胃體�����,直徑為20~25 mm�����,按實(shí)驗(yàn)先后順序編號(hào)1~5��。將離體豬胃放于提前準(zhǔn)備好的托盤中����,保證人工病變位于重力低位。由1名內(nèi)鏡醫(yī)生預(yù)先完成黏膜下注射和環(huán)切��。
2.手術(shù)機(jī)器人輔助ESD手術(shù)過程:機(jī)器人輔助黏膜下剝離由2名操作者(編號(hào):甲和乙)完成��。實(shí)驗(yàn)開始前��,2名操作者接受為期1 d的機(jī)器人輔助ESD培訓(xùn)����,包括1 h的ESD步驟講解、1例傳統(tǒng)ESD操作觀摩和4 h的機(jī)器人操作練習(xí)��。實(shí)驗(yàn)應(yīng)用的高頻發(fā)射器為華博A350(中國)�����。主要步驟如下:(1)安裝和調(diào)試機(jī)器人����;(2)操縱機(jī)器人左手夾持黏膜邊緣,暴露黏膜下視野�����,操縱機(jī)器人右手進(jìn)行黏膜下剝離;(3)剝離完成后�����,利用左從手夾鉗將切下的病變組織取出��;(4)向胃內(nèi)充氣����,觀察有無漏氣,以判斷有無穿孔����;(5)觀察剖面。
3.結(jié)局指標(biāo)和相關(guān)定義:主要結(jié)局指標(biāo)為黏膜下剝離速度�����,次要結(jié)局指標(biāo)包括肌層損傷率����、穿孔率以及機(jī)器人的抓取效率。黏膜下剝離速度由切除黏膜面積(mm2)/黏膜下剝離時(shí)間(min)計(jì)算得來,切除黏膜面積按照?qǐng)A形或橢圓形的面積公式計(jì)算��,黏膜下剝離時(shí)間為開始黏膜下剝離至整個(gè)病變切除的間隔時(shí)間�����。機(jī)器人的抓取效率用每個(gè)病變需要夾鉗夾取的次數(shù)來評(píng)估��。
結(jié) 果
一����、DREAMS系統(tǒng)應(yīng)用前測(cè)試結(jié)果
生物相容性測(cè)試顯示其不會(huì)導(dǎo)致皮膚過敏和皮內(nèi)反應(yīng)�����,無潛在的細(xì)胞毒性��,具有良好的生物相容性��。電氣安全測(cè)試結(jié)果顯示接地阻抗��、漏電流及電介質(zhì)強(qiáng)度均滿足國家標(biāo)準(zhǔn)��。
二��、DREAMS系統(tǒng)在離體豬胃ESD中的有效性和安全性
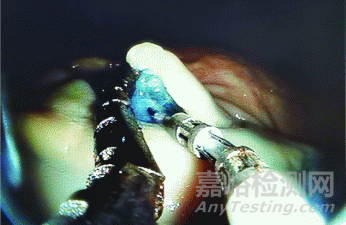
本研究成功完成了10例機(jī)器人輔助ESD手術(shù)(圖7),10個(gè)病變均實(shí)現(xiàn)整塊切除����,病變直徑(22.34±2.39)mm,剝離時(shí)間(15.00±8.90)min�����,剝離速度(141.79±79.12)mm2/min����,平均每個(gè)病變需要夾取4.2次,共有4例ESD出現(xiàn)肌層損傷����,無穿孔發(fā)生,具體情況見表1����。
圖7 DREAMS系統(tǒng)輔助下離體豬胃的內(nèi)鏡黏膜下剝離術(shù),圖中左從手夾持黏膜邊緣并提拉黏膜��,暴露手術(shù)視野��,右從手進(jìn)行黏膜下剝離
表1 兩名操作者DREAMS系統(tǒng)輔助離體豬胃內(nèi)鏡黏膜下剝離術(shù)的完成情況
|
操作者 |
實(shí)驗(yàn)先后順序編號(hào) |
病變部位 |
病變直徑 |
剝離時(shí)間 |
病變面積 |
剝離速度 |
是否發(fā)生 |
是否發(fā)生穿孔 |
|
(mm) |
(min) |
(mm2) |
(mm2/min) |
肌層損傷 |
|
甲 |
1 |
胃竇 |
24.83 |
15.98 |
1 935.90 |
121.15 |
是 |
否 |
|
2 |
胃竇 |
23.24 |
13.57 |
1 695.91 |
124.97 |
否 |
否 |
|
3 |
胃竇 |
22.03 |
12.33 |
1 523.91 |
123.59 |
否 |
否 |
|
4 |
胃竇 |
23.36 |
10.83 |
1 713.47 |
158.21 |
否 |
否 |
|
5 |
胃竇 |
25.7 |
8.98 |
2 073.94 |
230.95 |
否 |
否 |
|
乙 |
1 |
胃體 |
16.38 |
39.73 |
842.48 |
21.21 |
是 |
否 |
|
2 |
胃體 |
21.36 |
17.72 |
1 432.62 |
80.85 |
是 |
否 |
|
3 |
胃體 |
21.25 |
12.03 |
1 417.91 |
117.86 |
是 |
否 |
|
4 |
胃體 |
22.39 |
13.85 |
1 574.12 |
113.65 |
否 |
否 |
|
5 |
胃體 |
22.81 |
5.02 |
1 633.73 |
325.44 |
否 |
否 |
討 論
近年來����,我國消化道腫瘤的發(fā)病率和死亡率明顯升高����,人們逐漸開始重視消化道腫瘤的早診�����、早治����。及時(shí)將消化道早癌安全有效地切除是改善患者生活質(zhì)量的保障��。與EMR相比����,ESD可以切除直徑>2 cm的病變,且擁有更高的完整切除率和更低的原位復(fù)發(fā)率�����;與外科手術(shù)相比����,ESD具有更小的創(chuàng)傷、更少的手術(shù)費(fèi)用和更短的住院時(shí)間等優(yōu)點(diǎn),已經(jīng)成為消化道早癌的標(biāo)準(zhǔn)治療方式����。然而,利用傳統(tǒng)的單通道內(nèi)鏡和手術(shù)器械進(jìn)行ESD操作時(shí)��,內(nèi)鏡醫(yī)生每次只能應(yīng)用一個(gè)手術(shù)器械�����,且手術(shù)器械自由度低����、缺乏力感知,醫(yī)生通過操縱內(nèi)鏡完成病變切除時(shí)手術(shù)精度低����,存在較高的出血、穿孔風(fēng)險(xiǎn)�����,大大限制了其在偏遠(yuǎn)地區(qū)及某些西方國家的推廣和應(yīng)用�����。
在外科手術(shù)中,醫(yī)生能夠進(jìn)行雙手操作����,通過雙手配合形成操作三角,手術(shù)視野清晰�����、手術(shù)操作靈活��。通過消化內(nèi)鏡機(jī)器人模擬外科的手術(shù)模式是降低ESD技術(shù)要求��、減少并發(fā)癥����、縮短學(xué)習(xí)曲線的有效手段�����。目前�����,能夠完成離體ESD操作的消化內(nèi)鏡機(jī)器人以新加坡的EndoMASTER系統(tǒng)�����、法國的STRAS系統(tǒng)和美國的FLEX系統(tǒng)為代表。EndoMASTER系統(tǒng)由主從手系統(tǒng)和相對(duì)獨(dú)立的三通道內(nèi)鏡系統(tǒng)組成����,其兩條機(jī)械臂通過內(nèi)鏡的兩個(gè)工作通道到達(dá)操作部位,其末端執(zhí)行器包括電刀和抓鉗����,抓鉗負(fù)責(zé)提拉病變黏膜,輔助暴露手術(shù)視野�����。STRAS系統(tǒng)是基于Anubiscope平臺(tái)發(fā)展而來的�����,由一條專用的內(nèi)窺鏡和兩條操作臂組成�����,其兩條操作臂通過內(nèi)鏡頭端兩側(cè)專用的通道伸出��,伸出后向內(nèi)彎曲可形成操作三角����,避免對(duì)鏡頭的遮擋�����。FLEX系統(tǒng)主要應(yīng)用于頭頸部手術(shù)����,于2017年獲得FDA批準(zhǔn)用于消化系統(tǒng)ESD手術(shù)�����,該系統(tǒng)的內(nèi)鏡外側(cè)面設(shè)計(jì)有兩個(gè)外掛的工作通道�����,用于兩條機(jī)械臂的通過��。上述機(jī)器人均已通過離體實(shí)驗(yàn)驗(yàn)證�����,可以不同程度降低ESD操作難度����,縮短手術(shù)時(shí)間和學(xué)習(xí)曲線,增加手術(shù)安全性��。EndoMASTER系統(tǒng)更是通過人體試驗(yàn)進(jìn)一步證實(shí)了其安全性和有效性��。盡管如此��,目前的消化內(nèi)鏡手術(shù)機(jī)器人仍存在許多不足����,如尺寸較大或工作通道外置,增加了進(jìn)鏡時(shí)黏膜損傷的風(fēng)險(xiǎn)��,又如整體長(zhǎng)度不足��,僅能到達(dá)直腸和乙狀結(jié)腸�����,無法進(jìn)行近端結(jié)腸和上消化道的手術(shù)�����。
本中心研發(fā)的消化內(nèi)鏡微創(chuàng)手術(shù)機(jī)器人有效地解決了上述問題��,與現(xiàn)有的消化內(nèi)鏡手術(shù)機(jī)器人相比�����,具有以下優(yōu)點(diǎn):(1)直徑小,外觀光滑�����。本機(jī)器人內(nèi)鏡系統(tǒng)與傳統(tǒng)內(nèi)鏡相似����,無外置工作通道。前端部外徑為11.8 mm�����,與現(xiàn)有檢查內(nèi)鏡相似����,不會(huì)額外增加黏膜損傷的風(fēng)險(xiǎn)。(2)整體長(zhǎng)度超過1.3 m�����,可以覆蓋食管����、胃、結(jié)腸�����。(3)根據(jù)左右從手不同功能����,設(shè)計(jì)不同結(jié)構(gòu)。左從手為夾鉗��,集成于剛度可變的柔性臂����。一方面可以根據(jù)手術(shù)需要改變剛度,低剛度時(shí)順應(yīng)柔軟����、狹長(zhǎng)的消化道,高剛度時(shí)可承載組織的牽拉力��。另一方面�����,多自由度柔性臂可通過外展和內(nèi)收形成操作三角,便于手術(shù)視野的暴露��。右從手為電刀�����,集成于尺寸小����、運(yùn)動(dòng)范圍大的腕關(guān)節(jié),控制簡(jiǎn)單����,覆蓋病變范圍廣。本研究首先通過生物相容性測(cè)試和電氣安全測(cè)試驗(yàn)證了DREAMS系統(tǒng)的生物安全和電氣安全��,并進(jìn)一步通過離體豬胃實(shí)驗(yàn)證明了DREAMS系統(tǒng)可以輔助操作者安全地完成ESD手術(shù)操作�����,且具有縮短學(xué)習(xí)曲線趨勢(shì)��。
主從遙控操作引起的末端手術(shù)器械與軟組織之間交互作用力的感知缺乏是目前手術(shù)機(jī)器人系統(tǒng)普遍存在的問題��。由于缺乏力感知����,操作力難以控制,過大的操作力容易對(duì)組織造成額外的損傷����。利用視覺反饋可以在一定程度上彌補(bǔ)這一缺點(diǎn),操作者可以通過觀察組織形變來估計(jì)施加力的大小����,但是仍存在力覺信息估計(jì)不準(zhǔn)確、對(duì)操作者和成像系統(tǒng)要求高等問題����。將觸覺傳感器和觸覺反饋算法集成到手術(shù)機(jī)器人系統(tǒng)是實(shí)現(xiàn)精準(zhǔn)力感知和力反饋的可靠方法。然而����,受到操作空間狹小、末端執(zhí)行器尺寸嚴(yán)格受限的影響��,技術(shù)難度極高�����。目前�����,本系統(tǒng)已經(jīng)完成微型力傳感器的研發(fā)和力反饋算法的構(gòu)建,第二代機(jī)器人將實(shí)現(xiàn)力感知和力反饋功能的集成�����。
本研究及機(jī)器人系統(tǒng)仍存在一些不足����。首先,該研究?jī)H完成10例ESD手術(shù)����,且機(jī)器人僅在黏膜下剝離階段應(yīng)用?���?紤]到黏膜下剝離是ESD手術(shù)過程中難度較大、并發(fā)癥較多的步驟��,驗(yàn)證機(jī)器人在該步驟的有效性和安全性尤為重要��。今后還需要樣本量更大的隨機(jī)對(duì)照研究驗(yàn)證機(jī)器人在ESD全過程中的應(yīng)用效果��。其次����,內(nèi)鏡系統(tǒng)未實(shí)現(xiàn)主從控制����,手術(shù)過程中需要一名助手配合進(jìn)行內(nèi)鏡微調(diào)��。設(shè)計(jì)與傳統(tǒng)雙通道內(nèi)鏡相似的內(nèi)鏡系統(tǒng)�����,不改變醫(yī)生原有的內(nèi)鏡操作習(xí)慣�����,可以在很大程度上促進(jìn)機(jī)器人系統(tǒng)的推廣和應(yīng)用��。第二代機(jī)器人將根據(jù)內(nèi)鏡的結(jié)構(gòu)特點(diǎn)和醫(yī)生的操作習(xí)慣����,設(shè)計(jì)內(nèi)鏡自動(dòng)控制系統(tǒng)��,醫(yī)生通過操作主手實(shí)現(xiàn)對(duì)內(nèi)鏡的控制��,節(jié)省人力����,提高手術(shù)效率��。最后��,內(nèi)鏡系統(tǒng)僅設(shè)計(jì)兩個(gè)工作通道�����,ESD手術(shù)過程中如使用其他器械需要進(jìn)行器械替換�����,延長(zhǎng)手術(shù)時(shí)間����。為了在保證機(jī)器人使用效果的前提下最大程度上減少內(nèi)鏡系統(tǒng)尺寸����,本機(jī)器人在設(shè)計(jì)時(shí)僅設(shè)計(jì)兩個(gè)工作通道。第二代機(jī)器人將綜合考慮機(jī)器人的尺寸和使用效率�����,對(duì)工作通道的數(shù)量和排布進(jìn)行進(jìn)一步設(shè)計(jì)和優(yōu)化����。
總之�����,本研究介紹了一種新型消化內(nèi)鏡微創(chuàng)手術(shù)機(jī)器人——DREAMS系統(tǒng)��,并對(duì)其進(jìn)行了多方位的應(yīng)用前測(cè)試和初步應(yīng)用評(píng)估����,初步結(jié)果顯示�����,DREAMS系統(tǒng)操作精準(zhǔn)����、安全有效��,在ESD手術(shù)中可有效改善黏膜下剝離視野����,降低黏膜下剝離難度,具有較高的手術(shù)安全性�����。但未來還需要更多隨機(jī)對(duì)照試驗(yàn)對(duì)其進(jìn)行進(jìn)一步評(píng)估和驗(yàn)證,在應(yīng)用反饋中推陳出新�����,實(shí)現(xiàn)DREAMS系統(tǒng)的不斷優(yōu)化和迭代�����。