1.1手術(shù)機(jī)器人技術(shù)發(fā)展現(xiàn)狀
從二十世紀(jì)末葉到本世紀(jì)初�,從西方海洋文明到東方陸地文明�,全球手術(shù)機(jī)器人技術(shù)歷經(jīng)數(shù)十年橫跨地域、時(shí)空�,開啟了將全人類帶入機(jī)器人治療的微創(chuàng)時(shí)代����。
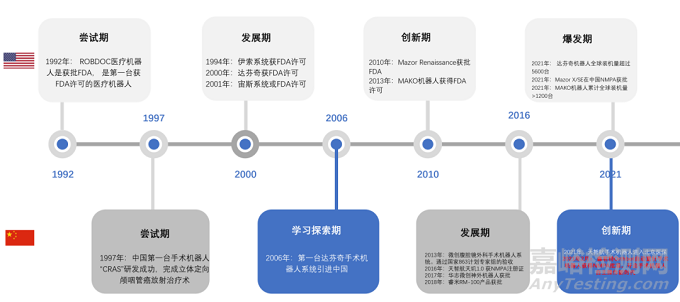
從手術(shù)機(jī)器人技術(shù)發(fā)展路徑來看,國外和國內(nèi)技術(shù)發(fā)展周期并不同步��,國外暫時(shí)走在國內(nèi)的前面��。國外從1992年第一臺(tái)獲得FDA批準(zhǔn)的ROBDOC醫(yī)療手術(shù)機(jī)器人開始����,到后來名冠全球的Davinci(達(dá)芬奇)手術(shù)機(jī)器人�,以及Zeus(宙斯)系統(tǒng)��、Mazor Renaissance��、MAKO機(jī)器人等。國內(nèi)第一臺(tái)獲得批準(zhǔn)用于臨床的手術(shù)機(jī)器人是1997年的CRAS(Computer and Robot Assisted Surgery)機(jī)器人�,其用于立體定向顱咽管癌的放射治療��,從此中國也開始了自己的手術(shù)機(jī)器人發(fā)展歷程。
另外從手術(shù)機(jī)器人技術(shù)發(fā)展周期來看����,國外大致經(jīng)歷嘗試期(1992年-2000年)��,發(fā)展期(2000-2010年)����,創(chuàng)新期(2010-2021年)和爆發(fā)期(2021-至今)。國內(nèi)發(fā)展周期也基本類似��,但是稍微滯后十年左右時(shí)間��,目前國內(nèi)尚處于創(chuàng)新期,國產(chǎn)手術(shù)機(jī)器人的爆發(fā)期何時(shí)到來����,我們對(duì)此充滿期待�。(請見圖1)
圖1:手術(shù)機(jī)器人國際與國內(nèi)發(fā)展歷程
1.2手術(shù)機(jī)器人產(chǎn)業(yè)發(fā)展現(xiàn)狀
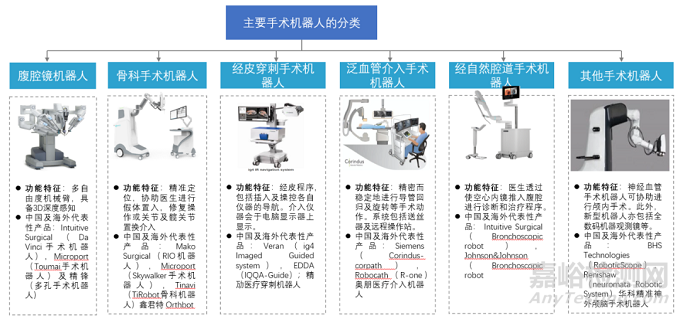
目前,從全球手術(shù)機(jī)器人產(chǎn)業(yè)來看����,主要分布在以下五個(gè)賽道(請參見圖2):
1.2.1.腹腔鏡手術(shù)機(jī)器人:國外以直覺外科Intuitive Surgical的達(dá)芬奇(Da Vinci)手術(shù)機(jī)器人為代表,擁有三維高清視野�,頭發(fā)絲大小的血管在醫(yī)生眼里也能清晰可見�,可轉(zhuǎn)腕的關(guān)節(jié),比人手更加的小巧靈活�,同時(shí)醫(yī)生的手部動(dòng)作可以準(zhǔn)確地重現(xiàn)在患者體內(nèi)的器械上,是腹腔鏡手術(shù)機(jī)器人的天花板����。國內(nèi)腹腔鏡手術(shù)機(jī)器人以上海微創(chuàng)Microport的圖邁(Toumai)手術(shù)機(jī)器人�,以及深圳精鋒(多孔手術(shù)機(jī)器人)為代表�。
1.2.2.骨科手術(shù)機(jī)器人:目前主要涵蓋了脊柱、關(guān)節(jié)(髖膝)�、創(chuàng)傷等骨科手術(shù)機(jī)器人,國外以美敦力Mazor X/SE脊柱手術(shù)機(jī)器人為典型代表�,占據(jù)了全球骨科手術(shù)市場的主要份額;國內(nèi)以天智航“天璣”脊柱手術(shù)機(jī)器人為代表��,其技術(shù)路線與捷邁邦美的Rosa Spine手術(shù)機(jī)器人基本一致����,都是屬于“機(jī)器人導(dǎo)航+醫(yī)生徒手操作”的路線。國內(nèi)脊柱手術(shù)機(jī)器人的后起之秀以鑫君特ORTHBOT®為代表��,開創(chuàng)了新的技術(shù)路線�,即“機(jī)器人導(dǎo)航+機(jī)器人自動(dòng)執(zhí)行手術(shù)操作”��,解決了醫(yī)生徒手操作不穩(wěn)��,不準(zhǔn)�,醫(yī)生疲勞等痛點(diǎn),真正實(shí)現(xiàn)了“不止是導(dǎo)航�,而是真正的參與手術(shù)操作”��。
1.2.3.經(jīng)皮穿刺手術(shù)機(jī)器人:其本質(zhì)仍然是醫(yī)學(xué)影像引導(dǎo)下的定位和光學(xué)追蹤或者電磁信號(hào)追蹤下的手持導(dǎo)航��。經(jīng)皮穿刺手術(shù)機(jī)器人海內(nèi)外的典型代表有Veran(ig4 imaged)�,EDDA(iQQA-Guide)以及上海精勵(lì)醫(yī)療穿刺機(jī)器人��。
1.2.4.泛血管介入手術(shù)機(jī)器人:它是從微導(dǎo)管/導(dǎo)絲的手工操作系統(tǒng)發(fā)展而來�,加入了操作手等精密控制的部件。屬于主從控制類的機(jī)器人系統(tǒng)����。其國內(nèi)外典型代表有Siemens(Corindus-corpath),Robocath(R-one)上海奧朋醫(yī)療介入機(jī)器人����。
1.2.5.經(jīng)自然腔道手術(shù)機(jī)器人:它是之前軟性內(nèi)窺鏡和鏡下操作器械的數(shù)字化和精準(zhǔn)化的產(chǎn)物。使用柔性機(jī)械臂��,經(jīng)自然腔道進(jìn)入人體腹腔進(jìn)行診斷和治療程序�,海外代表性產(chǎn)品有:Intuitive Surgical(Bronchoscopic robot)��,Johnson&Johnson (Bronchoscopic robot)��。
其中,骨科及神外手術(shù)機(jī)器人又分為:脊柱機(jī)器人����、關(guān)節(jié)機(jī)器人�、創(chuàng)傷機(jī)器人����、以及運(yùn)動(dòng)醫(yī)學(xué)機(jī)器人����。
圖2-全球主要手術(shù)機(jī)器人產(chǎn)業(yè)類型(圖片分類來源于網(wǎng)絡(luò))
手術(shù)機(jī)器人技術(shù)起源于工業(yè)機(jī)器人,最早應(yīng)用于軟組織穿刺(1985年),后來運(yùn)用于腹腔鏡手術(shù)(1994年)��,目前幾乎可以運(yùn)用于任何人體組織����,經(jīng)過數(shù)十年的探索和發(fā)展��,目前以達(dá)芬奇為代表的腹腔鏡手術(shù)機(jī)器人����,仍是手術(shù)機(jī)器人產(chǎn)業(yè)中“最靚的仔”����。
技術(shù)在進(jìn)步,產(chǎn)業(yè)在發(fā)展��,科技工作站和醫(yī)療人員在不停的探索手術(shù)機(jī)器人可能的適應(yīng)證����,各方都在尋找下一個(gè)“達(dá)芬奇”可能出現(xiàn)的領(lǐng)域。從近二十年發(fā)展來看����,人們很快并較為全面的找到手術(shù)機(jī)器人下一個(gè)應(yīng)用場景——骨科,典型的如脊柱內(nèi)固定�,膝髖關(guān)節(jié)置換等�。相對(duì)于基于主從控制的腹腔鏡手術(shù)機(jī)器人,應(yīng)用于硬組織的骨科機(jī)器人的關(guān)鍵技術(shù)又有哪些呢��?下面將以脊柱內(nèi)固定相關(guān)的脊柱手術(shù)機(jī)器人為例,拋磚引玉��。
2��、脊柱手術(shù)機(jī)器人技術(shù)路線和關(guān)鍵技術(shù)
2.1脊柱手術(shù)機(jī)器人主要技術(shù)路線
國內(nèi)外主要脊柱手術(shù)機(jī)器人輔助手術(shù)��,主要使用的設(shè)備包含術(shù)前CT掃描儀����、C-臂透視機(jī)��、醫(yī)生工作站和脊柱手術(shù)機(jī)器人(請見圖3)����。

圖3-國內(nèi)外主要脊柱手術(shù)機(jī)器人輔助手術(shù)所用設(shè)備
從工作流程來看��,脊柱手術(shù)機(jī)器人主要技術(shù)路線基本可以分為兩種:一種是術(shù)前規(guī)劃(基于術(shù)前CT)+術(shù)中二維影像����;另一種是術(shù)中規(guī)劃(直接基于術(shù)中三維影像)��。
針對(duì)第一種情形����,需要用到二維C-臂透視機(jī)�、醫(yī)生工作站、導(dǎo)航定位和脊柱手術(shù)機(jī)器人等設(shè)備��。大致流程是:術(shù)前進(jìn)行CT掃描,獲得患者手術(shù)區(qū)域的三維影像����,然后進(jìn)行分割、三維重建�,獲得虛擬的3D椎體��,對(duì)3D椎體圖像進(jìn)行分割。醫(yī)生在術(shù)前可以在三維椎體圖像上進(jìn)行手術(shù)規(guī)劃��,完成術(shù)前手術(shù)規(guī)劃����;在術(shù)中使用C臂對(duì)患者椎體進(jìn)行二維透視�,獲得二維影像����,通過圖形配準(zhǔn)算法將術(shù)中二維透視圖與術(shù)前的CT三維圖像進(jìn)行匹配,一般需要從不同角度完成兩張二維X光片對(duì)三維CT圖像的配準(zhǔn)�,從而達(dá)到術(shù)前手術(shù)規(guī)劃與患者手術(shù)位置的精確配準(zhǔn),之后通過導(dǎo)航實(shí)時(shí)跟蹤��、機(jī)械臂自動(dòng)定位和執(zhí)行手術(shù)操作(醫(yī)生徒手或機(jī)器人自動(dòng)執(zhí)行手術(shù)操作)����,完成手術(shù)。
而另外一種技術(shù)路線則不依賴術(shù)前的CT掃描����,它是在術(shù)中通過三維C臂或者O型臂掃描患者手術(shù)區(qū)域,完成機(jī)械臂和患者手術(shù)位置以及導(dǎo)航設(shè)備空間坐標(biāo)系的配準(zhǔn)��,之后進(jìn)行術(shù)中的手術(shù)規(guī)劃����,通過導(dǎo)航引導(dǎo)執(zhí)行機(jī)械臂輔助定位、醫(yī)生根據(jù)定位和方向執(zhí)行手術(shù)操作,通過導(dǎo)航系統(tǒng)驗(yàn)證植入物位置����,從而完成手術(shù)操作。
2.2脊柱手術(shù)機(jī)器人主要關(guān)鍵技術(shù)和難點(diǎn)
從上述兩種工作流程可以看出��,脊柱手術(shù)機(jī)器人的關(guān)鍵技術(shù)主要在以下四個(gè)方面:
(1)術(shù)前/術(shù)中規(guī)劃:主要技術(shù)涉及植入物建模�,影像三維重建與識(shí)別,多模態(tài)融合����,定位參考系等。多模態(tài)影像融合��、三維重建與識(shí)別對(duì)各家手術(shù)機(jī)器人產(chǎn)品提出了較大的兼容性挑戰(zhàn)����。定位技術(shù)主要有紅外��,以及可見光和磁導(dǎo)航��,其中加拿大NDI公司一家獨(dú)大�,市占率95%左右����,國內(nèi)公司也在嘗試其他導(dǎo)航技術(shù)路線����,比如鑫君特公司開發(fā)的基于可見光的雙目導(dǎo)航技術(shù)已經(jīng)成功用于其已注冊產(chǎn)品ORTHBOT®�。也有國內(nèi)企業(yè)在紅外導(dǎo)航領(lǐng)域開發(fā)自研產(chǎn)品,比如廣州艾目易和北京艾瑞麥迪等����。從產(chǎn)品穩(wěn)定性,技術(shù)領(lǐng)先性等都還有待市場驗(yàn)證��。如何實(shí)現(xiàn)導(dǎo)航定位技術(shù)的國產(chǎn)替代�,解決卡脖子問題,依然是國內(nèi)行業(yè)面臨的課題�。
(2)圖像分割與配準(zhǔn):主要技術(shù)包含CT與X光圖像分割,定位標(biāo)記板設(shè)計(jì)�,DRRX配準(zhǔn)算法等。除此之外����,圖像配準(zhǔn)算法還有點(diǎn)云配準(zhǔn)、結(jié)構(gòu)光等����。其中,DRRXS配準(zhǔn)算法的圖像計(jì)算量很大,配準(zhǔn)時(shí)間較長����,醫(yī)生需要在手術(shù)室長時(shí)間等待,影響工作效率��。如何提升計(jì)算效率�、算力或?qū)で笮碌募夹g(shù)解決當(dāng)前配準(zhǔn)算法的問題,依然任重道遠(yuǎn)��。
(3)機(jī)械臂定位與控制:技術(shù)上主要包含多設(shè)備間的坐標(biāo)系轉(zhuǎn)換����,安全邊界保護(hù),運(yùn)動(dòng)路徑規(guī)劃�,絕對(duì)定位與重復(fù)定位精度提升,力反饋傳感技術(shù)等��。機(jī)械臂的主要部件包含伺服電機(jī)����、諧波減速機(jī)����、傳感器和力控制器等。除了少部分手術(shù)機(jī)器人公司采用自研機(jī)械臂,大部分公司都采用外協(xié)通用的工業(yè)機(jī)械臂����。
通用機(jī)械臂的局限在于底層技術(shù)依賴、進(jìn)口價(jià)格高�、有斷供風(fēng)險(xiǎn)、基本不接受定制開發(fā)且售后不便等����。進(jìn)入2020年之后,雖然也有很多國產(chǎn)工業(yè)機(jī)械臂產(chǎn)品問世但伺服電機(jī)����、諧波減速機(jī)占據(jù)了較大成本空間且嚴(yán)重依賴進(jìn)口。市場主流的機(jī)械臂品牌(UR�、KUKA,節(jié)卡�、思靈、珞石����、Staubli)可選擇空間較小。而手術(shù)機(jī)器人公司自研機(jī)械臂將會(huì)面臨更加高昂的研發(fā)攤銷并且無法形成量產(chǎn)規(guī)模����。進(jìn)一步推高單個(gè)機(jī)械臂的平均可取得成本�。這些都嚴(yán)重制約著醫(yī)用機(jī)械臂和手術(shù)機(jī)器人的發(fā)展����。
(4)導(dǎo)航與追蹤:主要技術(shù)包含導(dǎo)航參考架設(shè)計(jì),工具建模�,特征點(diǎn)注冊算法,可視化融合�,刷新頻率策略,運(yùn)動(dòng)跟蹤感知與控制等�。骨科手術(shù)機(jī)器人導(dǎo)航追蹤技術(shù)主要采用紅外線和可見光技術(shù),還有少量磁導(dǎo)航技術(shù)��。由于骨科手術(shù)現(xiàn)場會(huì)用到大量的金屬工具��,會(huì)干擾磁場信號(hào)�,因此骨科很少使用磁導(dǎo)航技術(shù)。市場主流的紅外導(dǎo)航品牌有NDI(加拿大)����、Atracsys(瑞士)、PST(荷蘭)����、國產(chǎn)的有艾目易(中國廣州)��、艾瑞邁迪(中國北京)等。鑫君特Orthbot®機(jī)器人采用的是自研可見光導(dǎo)航技術(shù)——雙目視覺系統(tǒng)��,具有自主知識(shí)產(chǎn)權(quán)�,自主導(dǎo)航定位追蹤,空間定位功能��,手術(shù)部位監(jiān)控功能和遠(yuǎn)程監(jiān)控功能(請參見圖4)����。
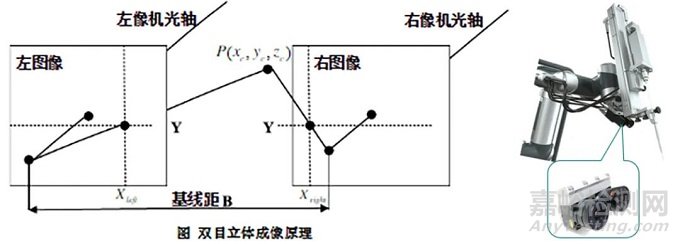
圖4-鑫君特ORTHBOT®雙目視覺導(dǎo)航系統(tǒng)(左側(cè)原理圖出處見參考文獻(xiàn))
紅外線技術(shù)主要通過紅外線追蹤定位在患者身上的參考架上的無源反射球來追蹤手術(shù)工具和患者的骨性結(jié)構(gòu),不同的參考架一般采用不規(guī)則四邊形進(jìn)行區(qū)分�,參考架需與患者保持相對(duì)靜止來保證患者位置的準(zhǔn)確性,且紅外線容易受到遮擋等影響�,從而影響跟蹤準(zhǔn)確性,及時(shí)性��。
脊柱手術(shù)機(jī)器人輔助技術(shù)經(jīng)歷了從最開始的①‘示蹤器結(jié)合手工操作’到②‘手工牽引機(jī)械臂工作’到③‘機(jī)械臂帶指向器配合手工操作’再到④‘機(jī)械臂帶動(dòng)工具結(jié)合機(jī)械臂導(dǎo)航����、運(yùn)動(dòng)平臺(tái)操作’。未來隨著人工智能��、人機(jī)交互技術(shù)及5G通訊的進(jìn)步��,手術(shù)機(jī)器人有望擴(kuò)展到更多的外科專業(yè)并實(shí)現(xiàn)更高的手術(shù)精準(zhǔn)度��、靈敏度及智能遠(yuǎn)程控制(請參見圖5)。
圖5-脊柱手術(shù)機(jī)器人技術(shù)演進(jìn)樹
3����、機(jī)器人在骨科手術(shù)運(yùn)用中的機(jī)遇
從2015年到今天,國務(wù)院�、發(fā)改委、工信部等多個(gè)部門發(fā)布或聯(lián)合發(fā)布了多個(gè)醫(yī)療器械相關(guān)的政策����,旨在促進(jìn)和支持醫(yī)療機(jī)器人技術(shù)、應(yīng)用和產(chǎn)業(yè)的發(fā)展����。如2021年12月28日,工信部等十部門聯(lián)合印發(fā)《“十四五”醫(yī)療裝備產(chǎn)業(yè)發(fā)展規(guī)劃》提出:攻關(guān)智能手術(shù)機(jī)器人�,加快突破快速圖像配準(zhǔn)、高精度定位�、智能人機(jī)交互、多自由度精準(zhǔn)控制等關(guān)鍵技術(shù)�。手術(shù)機(jī)器人應(yīng)用的最大特點(diǎn)是安全、準(zhǔn)確��、微創(chuàng)��。機(jī)器人手術(shù)療法的可復(fù)制性�、可預(yù)見性�,能夠控制手術(shù)風(fēng)險(xiǎn)降低醫(yī)療事故��,病人可獲得更好的療效和更快的術(shù)后康復(fù)時(shí)間�。隨著人工智能和機(jī)器學(xué)習(xí)技術(shù)的發(fā)展�,機(jī)器人手術(shù)系統(tǒng)能夠更好地適應(yīng)不同的手術(shù)和患者需求,并在手術(shù)中做出更精確的決策����。(請見圖6)
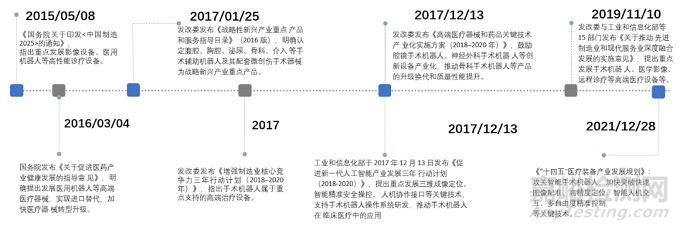

圖6-醫(yī)療機(jī)器人相關(guān)國家政策
骨科手術(shù)機(jī)器人使用數(shù)字化技術(shù)以及計(jì)算機(jī)輔助可以保證更加精準(zhǔn)地執(zhí)行手術(shù)。在臨床上給病人帶來了穩(wěn)定的療效和較少的創(chuàng)口����,縮短康復(fù)時(shí)間。醫(yī)生也可以減輕疲勞�,減少術(shù)中射線暴露的計(jì)量。確保手術(shù)效果的穩(wěn)定性和一致性�。病人和醫(yī)生都能獲益。
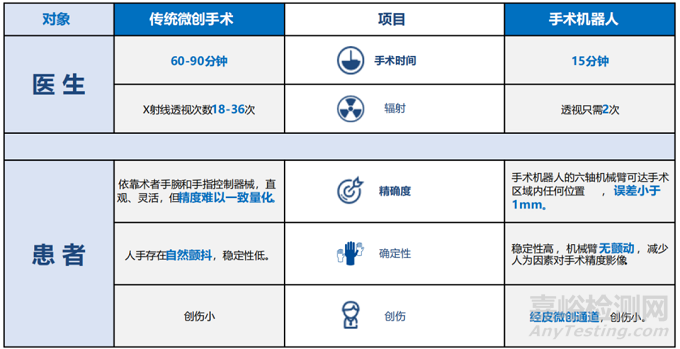
表1:手術(shù)機(jī)器人與傳統(tǒng)微創(chuàng)手術(shù)對(duì)比圖
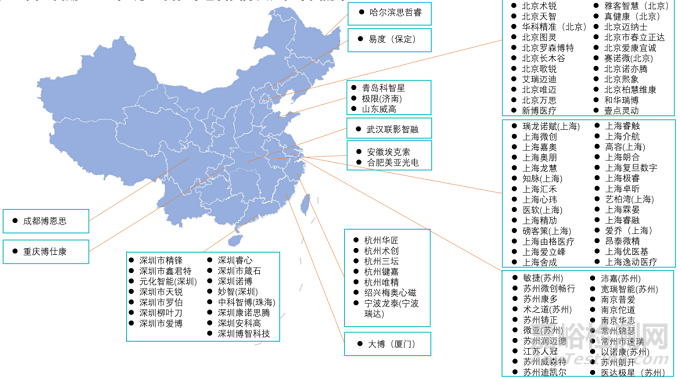
在這樣的臨床良好預(yù)期下以及國外手術(shù)機(jī)器人的先驗(yàn)經(jīng)驗(yàn)的影響下�,從2015年開始到2020年,國內(nèi)出現(xiàn)了對(duì)手術(shù)機(jī)器人產(chǎn)品和創(chuàng)新Startup公司的資本追逐浪潮�,涌現(xiàn)出一大批創(chuàng)新企業(yè)專注于手術(shù)機(jī)器人的研發(fā)領(lǐng)域,遍布各個(gè)細(xì)分賽道����。從地域上看�,北京��、上海以及長三角��、深圳仍是手術(shù)機(jī)器人的產(chǎn)業(yè)集群集中地�,也不乏一些新興企業(yè)布局在武漢、重慶����、成都、合肥等中部地區(qū)����。而且不局限于經(jīng)典的五大賽道,還有一些公司專注于神外�、消化道介入、牙科植入��、植發(fā)等領(lǐng)域��。資本的持續(xù)投入給中國手術(shù)機(jī)器人領(lǐng)域的崛起創(chuàng)造了良好的開始��,同時(shí)也帶來了過高的預(yù)期和緊迫的時(shí)間壓力�。
圖7-國內(nèi)手術(shù)機(jī)器人公司地域分布(不完全統(tǒng)計(jì))
在國家和地方政策的促進(jìn)和支持下,手術(shù)機(jī)器人技術(shù)發(fā)展和應(yīng)用得到了長足進(jìn)步,盡管如此����,也面臨一些挑戰(zhàn)。
4�、機(jī)器人在骨科手術(shù)運(yùn)用中的挑戰(zhàn)
骨科手術(shù)機(jī)器人的應(yīng)用和推廣主要面臨以下挑戰(zhàn):
挑戰(zhàn)一:技術(shù)限制。
手術(shù)場景單一:一臺(tái)機(jī)器人適用特定適應(yīng)證����,拓展適應(yīng)證需要重新臨床和注冊����,注冊周期和研發(fā)以及前期投入都很大;手術(shù)設(shè)備種類繁多��,操作復(fù)雜�,術(shù)中醫(yī)生之間、跟臺(tái)人員之間的相互交互頻繁��;數(shù)據(jù)安全和隱私保護(hù)限制了機(jī)器人廠商對(duì)醫(yī)學(xué)數(shù)據(jù)的利用��,目前醫(yī)院的數(shù)據(jù)都不能直接用于產(chǎn)品研發(fā)��,都是數(shù)據(jù)孤島��,難以實(shí)現(xiàn)信息共享,不利于機(jī)器人技術(shù)迭代升級(jí)�。
挑戰(zhàn)二:成本高昂。
涉及研發(fā)����、測試、驗(yàn)證�、臨床、注冊�、制造、銷售推廣����,售后服務(wù)等成本。比這些更重要的是時(shí)間成本:一個(gè)手術(shù)機(jī)器人項(xiàng)目的研發(fā)��,從立項(xiàng)到上市的完整時(shí)間周期少則需要4~5年����,多則時(shí)間更長。
挑戰(zhàn)三:醫(yī)保政策�。
國家醫(yī)保政策總體是控費(fèi),各地陸續(xù)出臺(tái)針對(duì)手術(shù)機(jī)器人收費(fèi)的設(shè)限�。如單純的機(jī)器人導(dǎo)航,耗材不能單獨(dú)收費(fèi)�,植入物走帶量采購等。再加上醫(yī)院采購還可能需要配置證,進(jìn)口論證����,這些都在限制手術(shù)機(jī)器人的臨床推廣。
挑戰(zhàn)四:商業(yè)化進(jìn)程��。
達(dá)芬奇的“剃須刀”模式�,主要由設(shè)備、耗材和服務(wù)組成����,此模式基本成為所有國內(nèi)手術(shù)機(jī)器人公司追求的方向�。隨著醫(yī)保政策對(duì)耗材的集采和設(shè)限,勢必會(huì)影響機(jī)器人廠商的商業(yè)化進(jìn)程����。從而限制國內(nèi)手術(shù)機(jī)器人領(lǐng)域的技術(shù)發(fā)展,進(jìn)一步拉大與國際最新技術(shù)前沿的差距��。
挑戰(zhàn)五:應(yīng)用推廣:手術(shù)機(jī)器人的應(yīng)用推廣涉及病人�,支付端。
從病人角度看����,與內(nèi)鏡微創(chuàng)手術(shù)相比,機(jī)器人手術(shù)臨床療效特別是術(shù)后短期療效并沒有很快顯現(xiàn),費(fèi)用卻要高不少�。從支付角度看,絕大多數(shù)手術(shù)機(jī)器人目前還只是手術(shù)輔助技術(shù)�,不利于臨床定價(jià),醫(yī)保政策和控費(fèi)����。從商業(yè)化角度看,手術(shù)機(jī)器人前期的研發(fā)投入和推廣投入太高����,效果顯現(xiàn)曠日持久,市場培育期仍然很長�,需要持續(xù)的高額投入,需要資本有足夠的耐心��。從大環(huán)境和應(yīng)用手術(shù)機(jī)器人的理念來看����,國內(nèi)手術(shù)機(jī)器人太過于集中在三甲醫(yī)院,配額受國家衛(wèi)健委管理��,只有副主任級(jí)以上的醫(yī)師才有機(jī)會(huì)運(yùn)用機(jī)器人開展手術(shù)研究�,而國外更多地用于年輕醫(yī)生,降低復(fù)雜手術(shù)門檻����,加速有難度手術(shù)的普及和常規(guī)手術(shù)的標(biāo)準(zhǔn)化�。
雖然機(jī)器人在骨科手術(shù)中運(yùn)用挑戰(zhàn)重重����,但是我們也應(yīng)該看到骨科手術(shù)機(jī)器人在數(shù)字化、精準(zhǔn)化����、微創(chuàng)化、個(gè)體化以及降低并發(fā)癥等方面優(yōu)勢所帶來的機(jī)遇��,特別是骨科領(lǐng)域��,在中國市場��,這是唯一由本土產(chǎn)品占據(jù)了主要市場份額的手術(shù)機(jī)器人賽道�。我們堅(jiān)信手術(shù)機(jī)器人仍是未來手術(shù)發(fā)展進(jìn)步的趨勢和正確方向����。
5、鑫君特機(jī)器人的特點(diǎn)
感知����、決策����、執(zhí)行和控制是機(jī)器人的基本特征��。鑫君特ORTHBOT®手術(shù)機(jī)器人具有更智能(全球首創(chuàng)智動(dòng)置入手術(shù)通路導(dǎo)針)����、更精準(zhǔn)(機(jī)械臂定位精度<1mm)、更安全(首創(chuàng)壓力傳感器實(shí)時(shí)反饋置針壓力)�、更便捷(首創(chuàng)雙目導(dǎo)航定位系統(tǒng),無創(chuàng)穩(wěn)定高效)的特點(diǎn)����,從而實(shí)現(xiàn)規(guī)劃+導(dǎo)航+智動(dòng)精確執(zhí)行,不僅僅是導(dǎo)航�,而是真正地參與手術(shù)。它是目前為止唯一一個(gè)具備感知��,決策��,執(zhí)行和控制全部四大技術(shù)特征的手術(shù)機(jī)器人����,它重新定義了智能時(shí)代的骨科手術(shù)。(下表展示了不同脊柱手術(shù)機(jī)器人平臺(tái)的置釘準(zhǔn)確率)
表2:不同脊柱機(jī)器人平臺(tái)的置釘準(zhǔn)確率(Gertzbein Robbins分級(jí)A+B)(圖表出處見參考文獻(xiàn))

圖8 ORTHBOT®機(jī)器人自動(dòng)置針系統(tǒng)
圖9 2023年2月第40卷第1期《應(yīng)用力學(xué)學(xué)報(bào)》中關(guān)于ORTHBOT®的介紹
骨科手術(shù)機(jī)器人的使命是幫助醫(yī)生把骨科手術(shù)帶入精準(zhǔn)微創(chuàng)時(shí)代����,從而使復(fù)雜手術(shù)簡單化�,常規(guī)手術(shù)標(biāo)準(zhǔn)化����,智能化程度高的手術(shù)機(jī)器人的廣泛使用,最終會(huì)降低整體醫(yī)療成本��。
參考文獻(xiàn)
1��、圖4來源于:X技術(shù) 原文鏈接:http://www.xjishu.com/zhuanli/55/201710141114.html
2�、表2來源于:北京積水潭醫(yī)院脊柱外科 作者:何達(dá) 吳佳源 原文鏈接:《何達(dá):脊柱機(jī)器人發(fā)展現(xiàn)狀及展望》