與傳統(tǒng)醫(yī)學(xué)成像相比�,植入式電子傳感器可以連續(xù)監(jiān)測組織的高級生理特性,例如粘附力�、pH 值、粘彈性和用于疾病診斷的生物標(biāo)志物����。然而,它們通常是侵入性的,需要通過手術(shù)植入��,并且經(jīng)常引起炎癥����。鑒于此,德國馬克斯普朗克智能系統(tǒng)研究所��、瑞士蘇黎世聯(lián)邦理工學(xué)院及美國范德堡大學(xué)的研究者提出了一種使用無線微型軟體機器人進行組織生理特性測量的微創(chuàng)方法����。 通過使用外部磁場控制機器人與組織的相互作用以及采集到的醫(yī)學(xué)圖像信息,生物組織特性可以基于機器人的形狀和磁場信息得以估計����。該機器人可以憑借多模態(tài)運動能力穿越組織屏障,在 X 射線或超聲成像的輔助下��,測量豬和小鼠胃腸道組織的粘附力�、pH 值和粘彈性。憑借前所未有的以最小侵入性和高分辨率感知人體深處組織生理特性的能力��,該技術(shù)有潛力在基礎(chǔ)研究和臨床實踐中實現(xiàn)關(guān)鍵應(yīng)用��。
1��、世界上第一種用于生物組織特性測量的毫米級軟體機器人
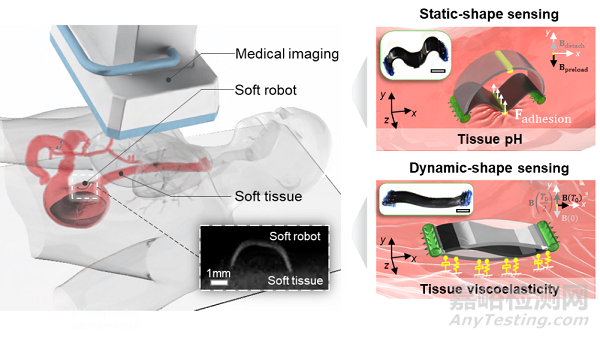
德國馬克斯普朗克智能系統(tǒng)研究所及美國范德堡大學(xué)聯(lián)合研制出了一種結(jié)合無線軟體機器人和醫(yī)學(xué)成像的系統(tǒng)來感知組織的高級生理特性,包括器官深處的粘附力����、pH 值和粘彈性(圖一)。機器人的身體由具有磁性的橡膠制成的�,它的雙足經(jīng)過特別設(shè)計可以粘附在組織表面,機器人可以在外界磁場的驅(qū)動下彎曲變形(圖二)�,在磁場的遠程控制下以多種運動模式穿越組織屏障到達指定位置后(圖三),利用身體上用于進行檢測的貼片與軟組織的相互作用��,同時通過醫(yī)學(xué)成像進行監(jiān)控和跟蹤��,實現(xiàn)對傳統(tǒng)的醫(yī)學(xué)成像工具����、電子傳感器和其他現(xiàn)有醫(yī)療設(shè)備難以測量的生物特性的檢測��。論文以“In-Situ Sensing Physiological Properties of Biological Tissues using Wireless Miniature Soft Robots” 為題發(fā)表在Science Advances上��。文章的共同第一作者為德國馬克斯普朗克研究所博士生王春翔����,博士后吳英丹博士,及美國范德堡大學(xué)助理教授董曉光博士�。同時����,文章的共同通訊作者為美國范德堡大學(xué)機械工程學(xué)院的董曉光教授及德國馬克斯普朗克智能系統(tǒng)研究所的Metin Sitti教授��。
圖一����,通過無線微型軟體機器人檢測軟組織生理特性的系統(tǒng)
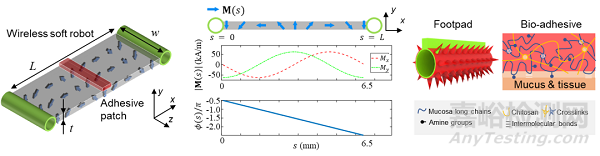
圖二,軟體機器人的設(shè)計與制造
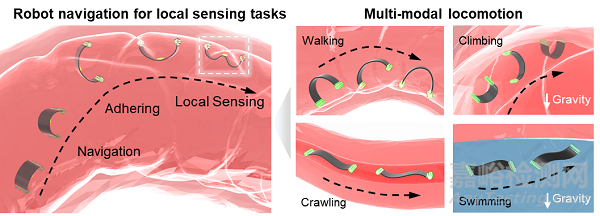
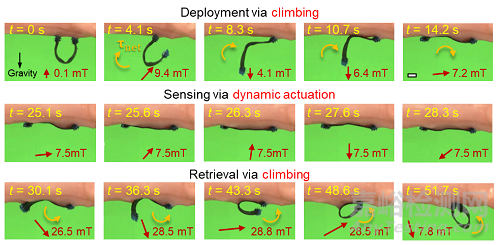
圖三�,軟體機器人的多模態(tài)運動
2、使用機器人的靜態(tài)形狀檢測機器人與組織的粘附力
機器人運動到指定位置后��,可以使用基于屈曲的靜態(tài)形狀來感知機器人與組織的粘附(圖四)����。其基本原理是,當(dāng)兩個機器人腳墊附著在軟組織表面時�,施加一個垂直于組織表面的磁場,機器人身體變形并朝向組織表面�。由于屈曲效應(yīng) ,粘合劑貼片將加載到組織表面�。而在移除磁場后,由于貼片組織粘附��,機器人將保持彎曲形����。之后施加一個垂直于組織表面的反方向的磁場����, 一旦該磁場場達到一定閾值��,分布于機器人身體的磁扭矩將粘合劑貼片從組織表面脫離�。將脫離瞬間的機器人身體形狀與該時刻的磁場信息輸入基于使用歐拉-伯努利梁理論的磁彈性模型,貼片與組織的粘附力可以被準(zhǔn)確估計出來�。
圖四,機器人部署到目標(biāo)位置����,以及基于機器人的屈曲效應(yīng)檢測軟組織的表面粘附力
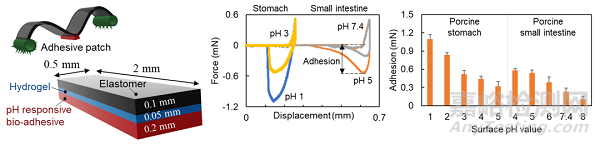
將進行特殊設(shè)計的對組織表面pH值進行響應(yīng)的粘附貼片附加在機器人身體上(圖五),該方法可以通過貼片與組織的粘附力進而對組織的 pH進行檢測��。
圖五����,帶有 pH 響應(yīng)生物粘合劑貼片的軟體機器人的設(shè)計
3��、使用機器人的動態(tài)形狀檢測組織的粘彈性
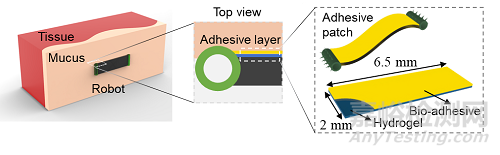
機器人還可以通過分布于其整體的粘合劑貼片粘附于軟組織表面(圖六)��。首先�,機器人被部署到指定位置��,利用非零凈磁扭矩將其生物粘附面粘附到目標(biāo)組織區(qū)域�。然后����,機器人在旋轉(zhuǎn)磁場的驅(qū)動下測量組織粘彈性。當(dāng)檢測過程完成時�,機器人身體可在相對較大的磁場下脫離組織表面(圖七)。
圖六��,生物粘附貼片設(shè)計
圖七�,軟體機器人的部署、檢測和分離
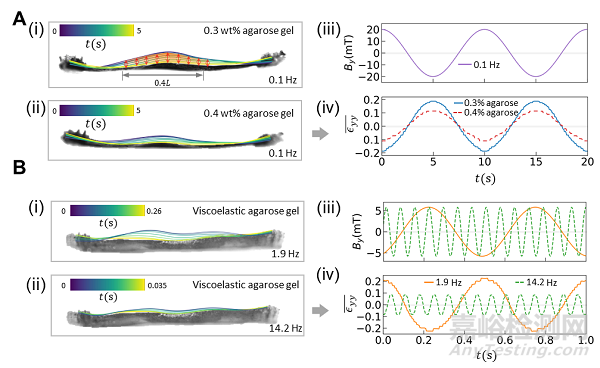
機器人檢測組織粘彈性的基本原理為����,在低頻率的旋轉(zhuǎn)磁場驅(qū)動下,機器人的形變程度與組織的楊氏模量有關(guān)��,即機器人的變形程度隨組織硬度的增加減?�?�;當(dāng)逐漸增加磁場頻率時��,由于組織粘度的存在機器人形變程度隨頻率的增加而減小����,通過檢測幅度隨頻率衰減的幅度����,組織粘度可被估計出來(圖八)����。
圖八,軟體機器人針對不同材料和在不同磁場頻率下的動態(tài)形狀變化
4����、精準(zhǔn)微創(chuàng)醫(yī)療:定點組織的疾病監(jiān)測
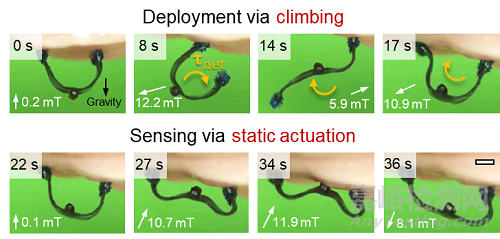
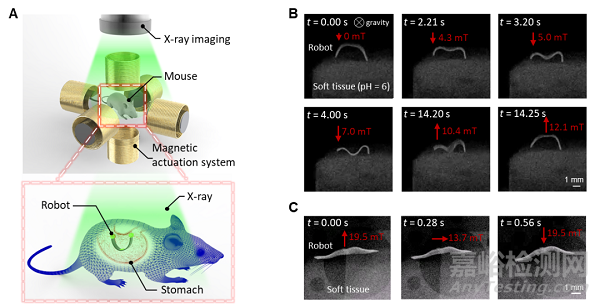
這款機器人具有監(jiān)測和了解患有疾病的軟組織的生物力學(xué)的潛力。在X射線成像設(shè)備下����,機器人首先被部署到小鼠模型的患病區(qū)域,再由外部磁場驅(qū)動以實現(xiàn)檢測組織pH與粘彈性(圖九)�。
圖九,軟體機器人對小鼠模型的患病區(qū)域的組織特性進行檢測
5�、總結(jié)及未來展望
這項工作提出了一個使用無線微型軟機器人和醫(yī)學(xué)成像來感知軟組織的生理特性的通用框架�。該框架使用無線驅(qū)動的微型機器人與軟組織表面相互作用,同時使用醫(yī)學(xué)成像監(jiān)測其形狀變化�,從而為監(jiān)測和了解疾病發(fā)展期間生物體內(nèi)的組織生物力學(xué)打開了一扇門,并為疾病治療提供反饋信息�。因此��,該系統(tǒng)為可用的微創(chuàng)傳感方法和醫(yī)療設(shè)備增加了前所未有的功能����,并有在基礎(chǔ)研究和臨床實踐中實現(xiàn)多種應(yīng)用的潛力��。