導(dǎo) 語
近日���,美國北卡羅來納大學(xué)教堂山分校和范德比爾特大學(xué)研究人員合作,研制出了一款能穿越活體肺組織的極其柔韌但堅(jiān)固的機(jī)器人��,相關(guān)研究發(fā)表在《Science Robotics》期刊上�����。
1、研究背景
肺癌是癌癥相關(guān)死亡的主要原因�����。有些隱藏在肺組織深處的腫瘤非常小�����,使得醫(yī)生難以觸及它們���。為應(yīng)對這一挑戰(zhàn)�����,美國北卡羅來納大學(xué)教堂山分校和范德比爾特大學(xué)研究人員一直在研究一種能穿越肺組織的極其柔韌但堅(jiān)固的機(jī)器人���。他們在《Science Robotics》期刊上最新發(fā)表的論文中�����,展現(xiàn)了機(jī)器人可自主地從“A點(diǎn)”出發(fā)到達(dá)“B點(diǎn)”��,同時(shí)避開微小氣道和血管等活體實(shí)驗(yàn)室模型中的重要結(jié)構(gòu)。
研究人員Akulian博士強(qiáng)調(diào)���,這項(xiàng)技術(shù)能夠達(dá)到機(jī)器人支氣管鏡無法達(dá)到的目標(biāo)��,對于醫(yī)生追蹤肺部的小目標(biāo)有很大幫助��。
2��、研究概述
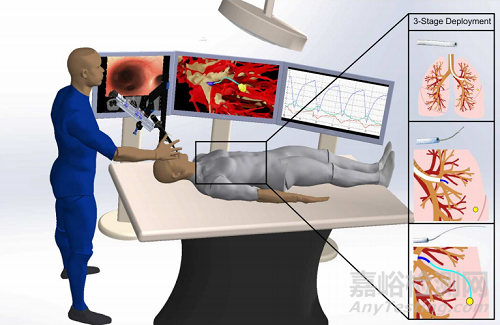
該半自主導(dǎo)向針系統(tǒng)由三個階段組成���,每個階段都直接對應(yīng)于醫(yī)療程序的一部分。第一階段由醫(yī)生手動引導(dǎo)傳統(tǒng)支氣管鏡通過氣道��。第二階段為醫(yī)生遠(yuǎn)程操作瞄準(zhǔn)裝置���。第三階段包括在考慮呼吸運(yùn)動和避免解剖學(xué)障礙(如臨床相關(guān)的脈管系統(tǒng)�����、支氣管和內(nèi)臟胸膜邊界)的情況下��,通過薄壁組織到達(dá)結(jié)節(jié)的自主針頭部署�����。
三個階段的控制方法-手動��,遠(yuǎn)程操作和自主-利用了人類和機(jī)器人的各自優(yōu)勢:支氣管鏡導(dǎo)航依賴于醫(yī)生現(xiàn)有的專業(yè)知識��;遠(yuǎn)程操作瞄準(zhǔn)裝置是手動控制和機(jī)器人自動化之間的橋梁��;最后一個階段是利用機(jī)器人的能力自主操縱可操縱指針準(zhǔn)確地到達(dá)目標(biāo)���。
半自主醫(yī)療機(jī)器人在肺部的三個階段(圖片來自論文)
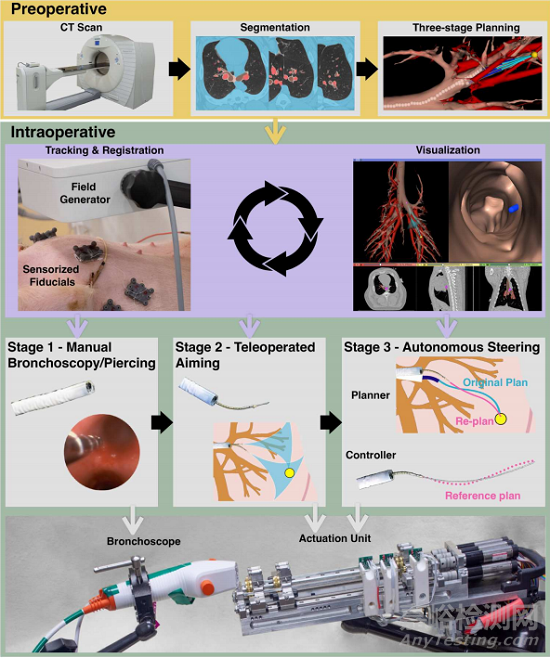
該研究設(shè)計(jì)的系統(tǒng)能夠準(zhǔn)確地獲得臨床相關(guān)的肺結(jié)節(jié)��。手術(shù)流程包括創(chuàng)建患者的解剖幾何模型��,通過運(yùn)動規(guī)劃來規(guī)劃三個階段中的每個階段的任務(wù)部署��,最后通過手動控制��、遠(yuǎn)程操作和自動化執(zhí)行計(jì)劃�����。
集成軟件和硬件組件的工作流程(圖片來自論文)
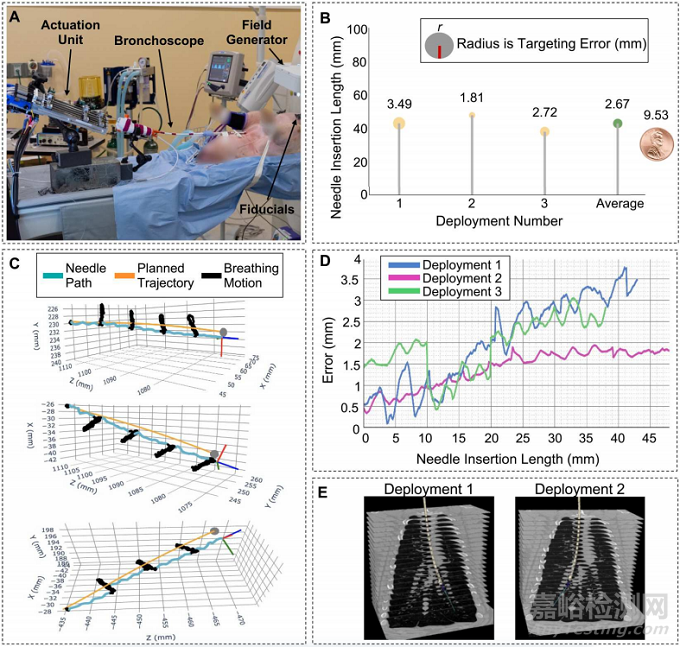
由于體內(nèi)環(huán)境和離體環(huán)境在呼吸運(yùn)動��、醫(yī)療風(fēng)險(xiǎn)以及手術(shù)過程中不確定性之間的差異���,離體針頭引導(dǎo)實(shí)驗(yàn)不足以表明臨床可行性。于是研究人員利用豬模型在現(xiàn)實(shí)環(huán)境中評估了系統(tǒng)的性能�����,并通過豬體內(nèi)實(shí)驗(yàn)證明了其臨床潛力�����。值得注意的是��,在所有的手術(shù)過程中�����,自動操縱針都沒有與任何解剖障礙發(fā)生碰撞��,實(shí)驗(yàn)中沒有出現(xiàn)氣胸��、肺不張��、血管穿孔和出血等不良事件�����。
豬體內(nèi)實(shí)驗(yàn)結(jié)果(圖片來自論文)
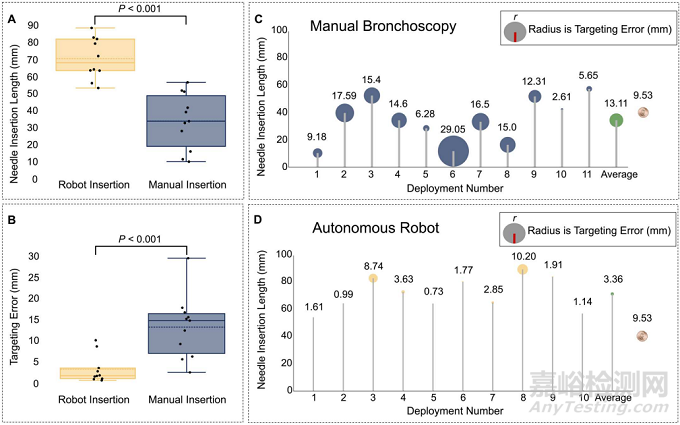
為了評估系統(tǒng)在改善難以到達(dá)的外周目標(biāo)方面的能力���,研究人員在離體豬肺中進(jìn)行了一項(xiàng)研究�����,將該系統(tǒng)與現(xiàn)代診斷支氣管鏡技術(shù)進(jìn)行了比較���。
實(shí)驗(yàn)結(jié)果表明��,使用機(jī)器人系統(tǒng)時(shí)的平均針頭長度比臨床支氣管鏡檢查時(shí)的平均針頭長度長(分別為 70.75 ± 11.49 mm 和 34.23 ± 15.44 mm , P = 0.000013)���,且機(jī)器人的瞄準(zhǔn)誤差明顯低于臨床支氣管鏡檢查(分別為3.36 ± 3.18 mm 和 13.11 ± 6.91 mm , P = 0.0009),即該研究系統(tǒng)能夠以高精度到達(dá)肺的外周薄壁組織內(nèi)的目標(biāo)���。
人工支氣管鏡檢查與機(jī)器人系統(tǒng)的對比實(shí)驗(yàn)結(jié)果(圖片來自論文)
豬體內(nèi)實(shí)驗(yàn)和比較研究證明了該半自主系統(tǒng)的臨床可行性��,在安全準(zhǔn)確地到達(dá)肺的外周薄壁組織內(nèi)的目標(biāo)方面��,該系統(tǒng)優(yōu)于現(xiàn)代臨床方法��。
3�����、研究意義
該項(xiàng)研究表明了可操縱針頭機(jī)器人的臨床潛力��,使醫(yī)生能夠在避開障礙物的同時(shí)安全地進(jìn)入活體軟組織區(qū)域���。自主可操縱針頭機(jī)器人的發(fā)展可以在許多介入性醫(yī)療程序中發(fā)揮作用,對于活組織檢查���、定向給藥���、消融和局部放射癌癥治療等具有重要意義。
內(nèi)容來源:https://www.sciencedaily.com/releases/2023/09/230921105658.htm
參考文獻(xiàn):
Alan Kuntz, Maxwell Emerson, Tayfun Efe Ertop, Inbar Fried, Mengyu Fu, Janine Hoelscher, Margaret Rox, Jason Akulian, Erin A. Gillaspie, Yueh Z. Lee, Fabien Maldonado, Robert J. Webster, Ron Alterovitz. Autonomous medical needle steering in vivo. Science Robotics, 2023; 8 (82)