感知生物組織的生理特性���,對于了解組織的發(fā)育進程和輔助疾病診療具有重要意義。準確地感知人體深處軟組織的生理特性���,也有助于監(jiān)測和了解疾病的發(fā)展過程���,并為治療提供反饋。
比如某些癌變的組織的硬度���,相比于健康組織會出現(xiàn)增加���;一些腸道疾病的發(fā)展���,會伴隨著組織 pH 的變化。
基于此���,研究人員提出一種新型微創(chuàng)方法���,可以使用無線微型軟體機器人對生物組織進行生理特性測量,讓微型軟體機器人的醫(yī)療功能得以拓展�。
此前的傳統(tǒng)醫(yī)學成像方法主要用于檢測組織的彈性,無法檢測粘附力等高級生理特性�。
相比之下,植入式電子傳感器可以連續(xù)監(jiān)測組織的高級生理特性���,例如粘附力�����、pH 值���、粘彈性、以及用于疾病診斷的生物標志物等�。但是,這通常是侵入性的�,需要通過手術(shù)植入�����,并且經(jīng)常會引起炎癥�����。
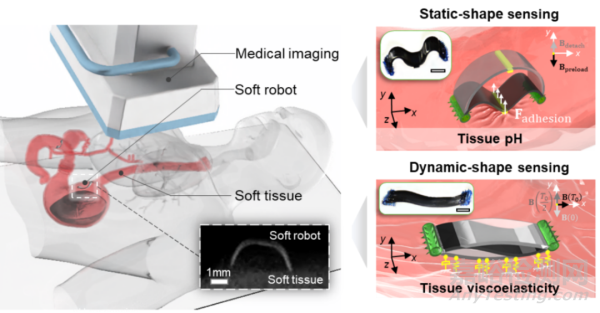
圖 | 通過無線微型軟體機器人檢測軟組織生理特性的系統(tǒng)(來源:Science Advances)
而本次工作通過結(jié)合無線軟體機器人和醫(yī)學成像�,來感知組織的一些高級生理特性比如器官深處的粘附力�、pH 值和粘彈性。
由磁場遠程驅(qū)動的毫米級軟體機器人能夠以受控方式�,附著和脫離軟組織表面,并與軟組織進行機械交互���。同時�����,還能通過醫(yī)學成像進行監(jiān)控和跟蹤機器人的形狀,例如超聲波和 X 射線醫(yī)學成像�。
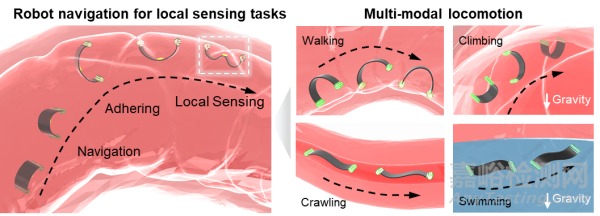
當將磁場信息與機器人的形狀信息結(jié)合并輸入力學模型之中,組織的生理特性就能被精準測量出來���。與之前報道的用于感知組織特性的植入式電子傳感器�、磁性微型設備和膠囊內(nèi)窺鏡相比,該方法利用機器人的多模式運動能力來穿越組織屏障���,故能以最小的侵入性進入封閉的狹小的空間�。
同時�����,這種方法可以感知組織的高級生理特性���,例如粘附力�����、pH 值和粘彈性�。而這些特性很難使用傳統(tǒng)的醫(yī)學成像工具�����、電子傳感器和其他現(xiàn)有醫(yī)療設備來感知���。
圖 | 軟體機器人的多模態(tài)運動(來源:Science Advances)
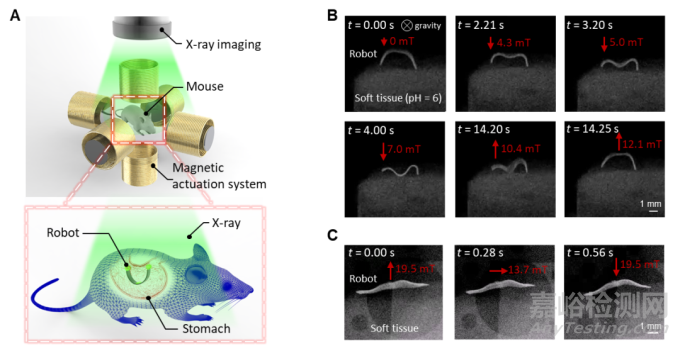
在應用上�����,此次成果主要可被用于精準微創(chuàng)醫(yī)療�����,針對定點生物組織開展疾病監(jiān)測�。比如在 X 射線成像設備下,機器人可以被部署到小鼠模型的患病區(qū)域�,再由外部磁場驅(qū)動以便實現(xiàn)檢測組織 pH 與粘彈性。
圖 | 軟體機器人對小鼠模型的患病區(qū)域的組織特性進行檢測(來源:Science Advances)
日前�,相關(guān)論文以《基于無線微型軟體機器人的生物組織生理特性原位檢測》(In situ sensing physiological properties of biological tissues using wireless miniature soft robots)為題發(fā)在 Science Advances 上[1]。
圖 | 相關(guān)論文(來源:Science Advances)
德國馬普智能系統(tǒng)研究所和瑞士蘇黎世聯(lián)邦理工學院博士生王春翔���、德國馬普智能系統(tǒng)研究所博士后吳英丹�����、美國范德堡大學董曉光教授是共同一作���,董曉光教授和德國馬克斯普朗克智能系統(tǒng)研究所梅廷·司提(Metin Sitti)教授擔任共同通訊。
未來�����,課題組打算提高機器人的生物相容性�����,并尋求與外科醫(yī)生的合作進行生物活體實驗�,加速將該方法用于實際臨床的進程。
參考資料:
1.Wang, C., Wu, Y., Dong, X., Armacki, M., & Sitti, M. (2023). In situ sensing physiological properties of biological tissues using wireless miniature soft robots. Science advances, 9(23), eadg3988.