導(dǎo) 語
近日,北卡羅來納州立大學(xué)和北卡羅來納大學(xué)教堂山分校進行的一項最新研究:神經(jīng)控制的機器人假肢腳踝可以讓截肢者更加自然地移動����,從而提高他們的穩(wěn)定性。這一研究成果發(fā)表在國際學(xué)術(shù)期刊《Science Robotics》上。
1����、研究背景
下肢截肢的人失去了肢體與日常環(huán)境互動的能力。截肢者通過假肢裝置重新行走����,這些假肢裝置通常是機械被動的,具有預(yù)定的剛度��,主要用于儲存和返回能量�。然而,截肢者的日常生活包含許多需要在缺失肢體處主動產(chǎn)生能量的活動��,而目前已有的假肢裝置在這些任務(wù)期間很難提供主動支持����。
2、研究概述
目前的控制方式大多適合于生物力學(xué)定義良好����、可預(yù)測的運動行為。然而��,這種自主控制不適合于在需要預(yù)備性調(diào)整(例如預(yù)見性姿勢調(diào)整(APA))或需要難以預(yù)定義的全身協(xié)調(diào)(例如補償性姿勢調(diào)整(CPA))情況下假肢的運動情況�。
APA對于維持平衡至關(guān)重要,人體知道即將發(fā)生擾動與不知道發(fā)生擾動時的穩(wěn)定性反應(yīng)有很大區(qū)別。這些意志的前饋動作減輕了CPA的負擔(dān)�,而CPA負責(zé)在擾動已經(jīng)發(fā)生后保持平衡。所以����,需要一種控制方式來解決人體APA和CPA的問題,使假肢運動穩(wěn)定性更好��。
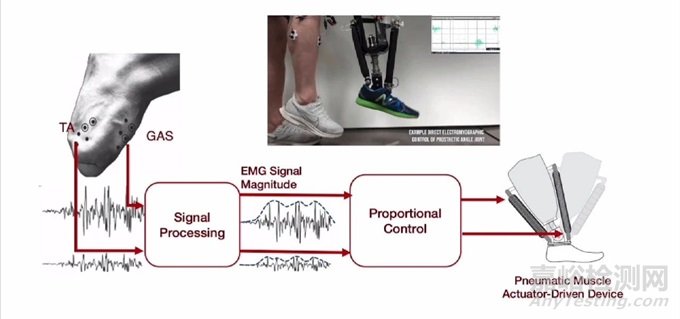
在這項研究中��,研究人員使用肌電圖傳感器(位于截肢部位的肌肉上)來捕獲肌肉彎曲時產(chǎn)生的電活動�,從而告訴假肢要彎曲哪塊人造肌肉以及彎曲的程度。這些傳感器在截肢者的假肢接受腔中放置�,改善姿勢控制和穩(wěn)定性�,使他們能夠以更加自然的方式移動。
圖1:假肢機器人負荷試驗(圖片來源于論文)
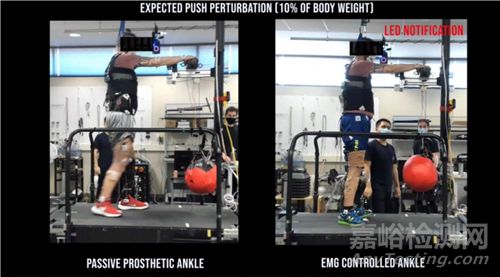
研究參與者在進行實驗時�,模擬日常生活中可能的擾動,如接球或拿起雜貨����。在這些情況下,他們需要快速作出反應(yīng)以保持平衡����。使用傳統(tǒng)假肢時,參與者需要邁出一步來應(yīng)對這些干擾,但使用神經(jīng)控制假肢����,他們可以更輕松地保持靜態(tài)姿勢,減少了跌倒的風(fēng)險��。
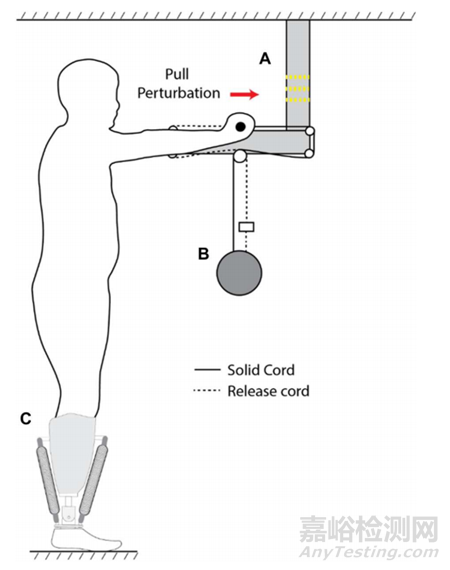
圖2:負荷試驗示意圖(圖片來源于論文)
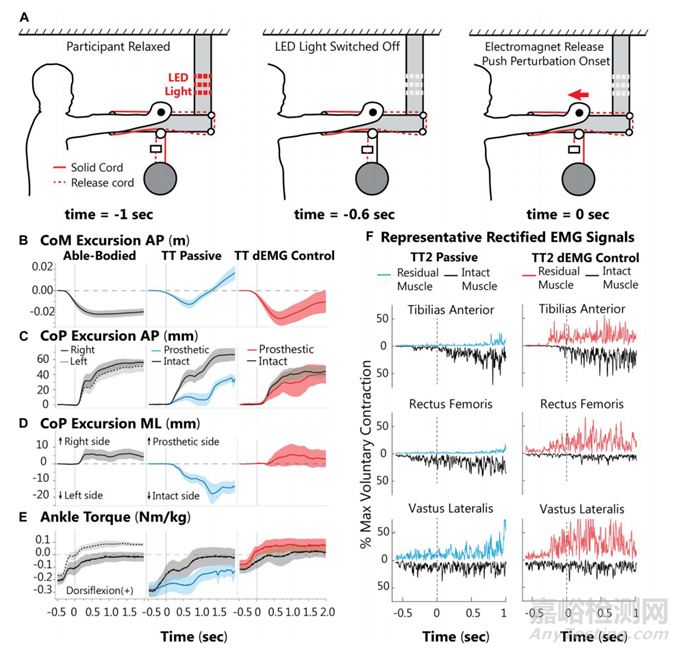
在有預(yù)期的推拉試驗中����,與被動條件相比,dEMG條件下的假肢參與者的穩(wěn)定性測量值有明顯改善��,參與者產(chǎn)生了預(yù)期的調(diào)整他們的質(zhì)心(CoM)對擾動的方向����,這與正常人參與者CoM的變化類似。
在代償性“保持”時間內(nèi)(t=1~2S期間平均值)����,實驗觀察到正常人和dEMG控制組(P=0.516)有相似的距離漂移(P=0.516),但與被動假肢(P=0.004)無關(guān)��。
圖3:正常人和假肢參與者對推動擾動的平均反應(yīng)(圖片來源于論文)
使用dEMG控制的假肢受試者在前后(AP)和內(nèi)側(cè)(ML)方向上的壓力中心(COP)漂移也比被動裝置有所改善��。在擾動之前��,正常人個體有一個靜息的趾屈扭矩(t=−0.5S),并在擾動前產(chǎn)生預(yù)期的扭矩變化��。在擾動開始后不久(t=0 S)�,個體主要用右腿產(chǎn)生背屈扭矩。使用dEMG控制的假肢參與者也從他們的假肢和正常肢體產(chǎn)生類似水平的扭矩��。
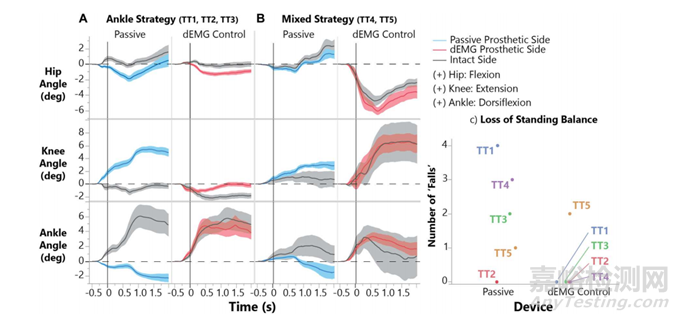
在實驗中觀察到了平衡策略的明顯變化��,使用dEMG控制與被動控制相比�,在使用dEMG時,三名受試者主要使用踝關(guān)節(jié)策略��,膝關(guān)節(jié)和髖關(guān)節(jié)的偏移相對較小�,踝關(guān)節(jié)的偏移量較大。另外兩名TT受試者使用混合策略�,同時從所有關(guān)節(jié)偏移。與被動控制相比��,這些參與者仍然改善了假肢和完整肢踝關(guān)節(jié)偏移之間的同步性����。
圖4:使用被動和 dEMG 控制假肢腳踝推動擾動期間的平衡策略(圖片來源于論文)
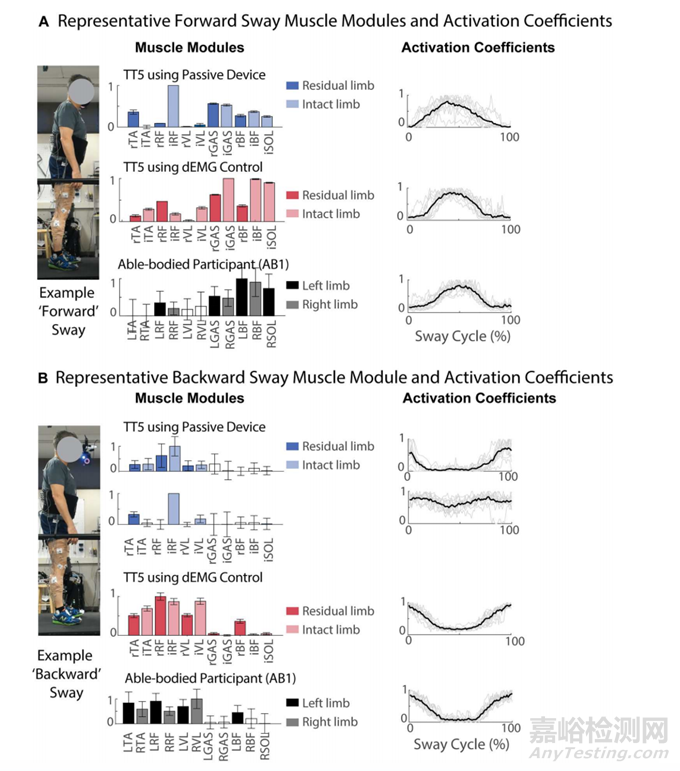
為了研究神經(jīng)協(xié)調(diào)��,參與者還被要求執(zhí)行姿勢搖擺任務(wù)��,同時從下肢的雙側(cè)肌肉記錄肌電圖信號。為了說明個體基礎(chǔ)上的神經(jīng)協(xié)調(diào)變化�,繪制了一名代表性正常人參與者(AB1)和一名代表性假肢參與者(TT5)的肌肉模塊結(jié)構(gòu)和激活系數(shù)。當TT5使用其被動裝置時�,我們觀察到單個前肌的顯著貢獻(雖然主要是后部肌肉被激活,但完整的股直肌貢獻最大)��,當使用dEMG控制假肢腳踝時�,這種貢獻明顯較小。在dEMG條件下使用的肌肉在肌肉結(jié)構(gòu)和激活系數(shù)方面與AB參與者中觀察到的肌肉明顯相似����。
圖5:代表性參與者肌肉模塊結(jié)構(gòu)和激活系數(shù)(圖片來源于論文)
3、研究意義
這一研究具有重要的臨床意義�,因為它為截肢者提供了更多的選擇,可以提高他們的生活質(zhì)量�。研究團隊計劃擴大試驗規(guī)模,以進一步驗證這一技術(shù)的有效性��。這一研究為未來的醫(yī)療技術(shù)和康復(fù)工作提供了新的方向�,為截肢者帶來了更多希望。
參考文獻:Aaron Fleming, Wentao Liu, He (Helen) Huang. Neural prosthesis control restores near-normative neuromechanics in standing postural control. Science Robotics, 2023; 8 (83) DOI: 10.1126/scirobotics.adf5758