導(dǎo) 語(yǔ)
近日,中國(guó)科技大學(xué)進(jìn)行的一項(xiàng)研究:具有閉環(huán)精細(xì)運(yùn)動(dòng)技能的便攜式軟體康復(fù)手套����,可以幫助中風(fēng)后手部功能受損的人實(shí)現(xiàn)單一和復(fù)雜的精細(xì)運(yùn)動(dòng)技能康復(fù)練習(xí),并完成一些日常生活活動(dòng)。這一研究成果發(fā)表在國(guó)際學(xué)術(shù)期刊《Nature machine intelligence》上�。
1、研究背景
每年��,全球有超過(guò)700萬(wàn)新增患者因中風(fēng)而出現(xiàn)手部殘疾����。因神經(jīng)通路受損,他們失去手部精細(xì)運(yùn)動(dòng)技能(fine motor skills, FMSs)����。神經(jīng)可塑性理論表明,通過(guò)重復(fù)的手部運(yùn)動(dòng)練習(xí)可以幫助他們重新建立調(diào)節(jié)手部功能的神經(jīng)通路��。因此��,患者通常會(huì)在醫(yī)院接受專業(yè)治療師的強(qiáng)化康復(fù)訓(xùn)練��。但傳統(tǒng)的康復(fù)治療往往會(huì)給患者帶來(lái)沉重的經(jīng)濟(jì)負(fù)擔(dān)�,且當(dāng)前治療師數(shù)量不足以滿足如此龐大患者人群的康復(fù)治療需求�。
近年來(lái),幫助患者進(jìn)行康復(fù)訓(xùn)練的機(jī)器人輔助技術(shù)迅速發(fā)展����,然而現(xiàn)有的康復(fù)手套在實(shí)現(xiàn)精細(xì)運(yùn)動(dòng)技能方面仍然面臨著巨大挑戰(zhàn)。大多數(shù)手套不能夠直接捕捉受損手指的變形情況,且它們?cè)谑种傅膹澢^(guò)程中無(wú)法實(shí)現(xiàn)閉環(huán)控制����,尤其在協(xié)調(diào)多個(gè)手指完成復(fù)雜的精細(xì)運(yùn)動(dòng)技能的時(shí)候。
2����、研究概述
該研究團(tuán)隊(duì)設(shè)計(jì)了一種便攜式軟體康復(fù)手套,能夠?qū)崿F(xiàn)具有實(shí)時(shí)感覺(jué)反饋和閉環(huán)控制系統(tǒng)的多種精細(xì)運(yùn)動(dòng)技能��。這種手套僅重0.49公斤����,具有緊湊、便攜和低噪音的優(yōu)點(diǎn)��,為患者在各種環(huán)境中的重復(fù)康復(fù)訓(xùn)練提供了更多的機(jī)會(huì)����,且已經(jīng)驗(yàn)證該手套可以幫助患者完成精細(xì)運(yùn)動(dòng)技能。
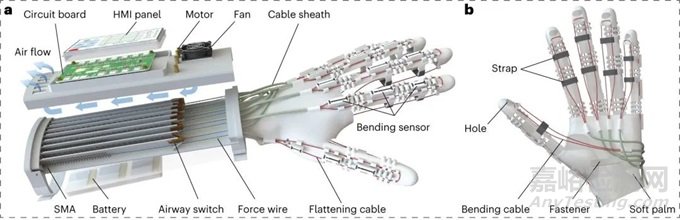
圖1:a)軟手套的分解圖�。通過(guò)選擇性地加熱SMA 彈簧致動(dòng)器,彎曲電纜和壓平電纜分別拉動(dòng)手指進(jìn)行彎曲和壓平��。電路板和 HMI 面板集成在一起����,便于控制和交互�。五對(duì)電機(jī)開(kāi)關(guān)用于選擇性地冷卻指定的 SMA��。b)軟手套手部的后視圖�。彎曲電纜穿過(guò)帶子的小孔并連接到指尖。指尖預(yù)留了一個(gè)孔�,用于保證觸摸靈敏度。(圖片來(lái)自原文)
此手套由三個(gè)主要模塊組成:可觸摸的人機(jī)界面面板(human–machine interface, HMI) ����、控制與驅(qū)動(dòng)系統(tǒng)以及帶有彎曲傳感器的仿生指套。人機(jī)界面面板可輸入所需精細(xì)運(yùn)動(dòng)技能康復(fù)命令以及顯示手指的實(shí)際狀態(tài)����。控制與驅(qū)動(dòng)系統(tǒng)通過(guò)形狀記憶合金(shape-memory-alloy)彈簧來(lái)實(shí)現(xiàn)康復(fù)命令��。帶有彎曲傳感器的仿生指套可以精確感測(cè)每個(gè)手指的三個(gè)關(guān)節(jié)角度�,并反饋到控制系統(tǒng)以閉環(huán)方式驅(qū)動(dòng)形狀記憶合金。
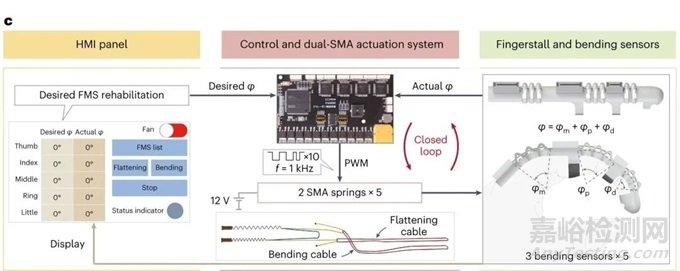
圖2:c)軟手套的工作原理����,其中所需的 FMS 康復(fù)命令被發(fā)送給 HMI,由控制電路處理并由 SMA 彈簧致動(dòng)器執(zhí)行以使目標(biāo)手指變形��。通過(guò)三個(gè)彎曲傳感器測(cè)量手指的實(shí)際彎曲角度(記為φ ) ��,然后饋送到電路板進(jìn)行閉環(huán)控制��,同時(shí)實(shí)時(shí)顯示在 HMI 面板上�。(圖片來(lái)自原文)
中風(fēng)后手部功能缺失患者使用定制軟體手套時(shí),手指實(shí)際彎曲角度與所需角度非常吻合����,只存在較小偏差。該偏差是由于中風(fēng)后個(gè)體在康復(fù)鍛煉過(guò)程中出現(xiàn)無(wú)法控制的肌肉反應(yīng)造成的����,但此種偏差通常在兩秒內(nèi)就會(huì)通過(guò)閉環(huán)控制系統(tǒng)被消除。
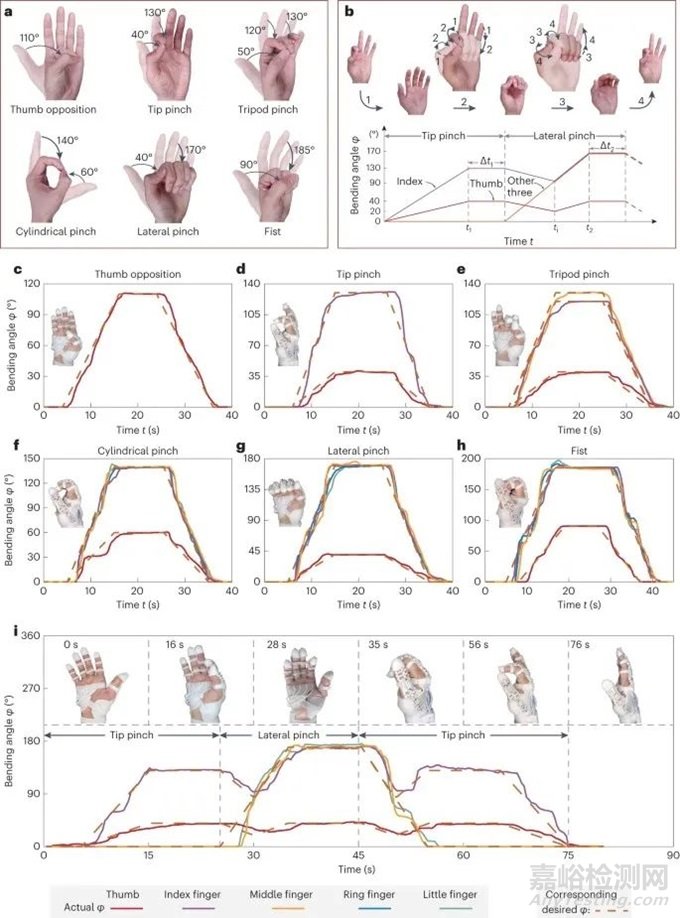
圖3:a)六種單模 FMS 的圖示:拇指對(duì)位��、尖端捏捏����、三腳架捏捏、圓柱形捏捏��、橫向捏捏和拳頭����。所涉及手指的彎曲角度在手勢(shì)附近提供��,箭頭表示運(yùn)動(dòng)方向��。b�,代表性開(kāi)關(guān)模式FMS:尖端捏緊到橫向到尖端捏緊以及五個(gè)手指的相應(yīng)控制方案����。c – h,六種單模式 FMS 康復(fù)中所需彎曲角度與實(shí)際彎曲角度的比較:拇指對(duì)位 ( c )��、尖端捏捏 ( d )��、三腳架捏捏 ( e )�、圓柱捏捏 ( f )、橫向捏捏 ( g ) 和拳頭(h)����。i,從尖端捏捏到橫向捏捏到尖端捏捏的代表性開(kāi)關(guān)模式 FMS 康復(fù)����。實(shí)線表示相關(guān)手指的實(shí)際彎曲角度,棕色虛線表示相應(yīng)的所需彎曲角度��。(圖片來(lái)自原文)
3��、研究意義與討論
此研究部分填補(bǔ)了現(xiàn)有康復(fù)手套缺乏手指運(yùn)動(dòng)感應(yīng)和閉環(huán)控制算法的空白,將傳感��、驅(qū)動(dòng)��、人機(jī)界面����、能源和閉環(huán)算法緊密集成�。這款康復(fù)手套可以讓中風(fēng)后的患者以更舒適方便的方式恢復(fù)手指的精細(xì)運(yùn)動(dòng)技能。對(duì)于肌肉無(wú)力或硬度較低的患者�,這款手套幫助他們高精度地完成精細(xì)運(yùn)動(dòng)技能康復(fù),有利于重建正確的神經(jīng)通路�。然而,對(duì)于肌肉強(qiáng)直的患者而言�,形狀記憶合金彈簧的力量可能不足以讓他們的手指變形,且缺乏全面數(shù)據(jù)來(lái)驗(yàn)證此款手套的長(zhǎng)期康復(fù)效果����。
參考文獻(xiàn):Sui, M., Ouyang, Y., Jin, H. et al. A soft-packaged and portable rehabilitation glove capable of closed-loop fine motor skills. Nat Mach Intell 5, 1149–1160 (2023). https://doi.org/10.1038/s42256-023-00728-z