由于對周圍環(huán)境的適應(yīng)性,軟性微型機器人已經(jīng)發(fā)展成為醫(yī)學(xué)領(lǐng)域的各種治療應(yīng)用�����,包括血管疏通���、細(xì)胞運輸和藥物傳遞���。然而,大多數(shù)軟性微型機器人在刪除外部驅(qū)動場后��,無法快速進(jìn)入���、檢索和維護(hù)其原始位置的操作。為此�����,中國醫(yī)科大學(xué)Guannan He和中國科學(xué)院沈陽自動化研究所焦念東副研究員介紹了一種用于靶向藥物輸送的軟磁性微型機器人���,它可以通過導(dǎo)管運輸?shù)襟w內(nèi)并錨定在組織上���。該微型機器人有一個雙層粘附體�����,帶有一個貽貝啟發(fā)的水凝膠層和一個章魚啟發(fā)的磁性結(jié)構(gòu)層��。根據(jù)水凝膠層在空氣和水中的粘附程度的差異�����,在醫(yī)療導(dǎo)管的幫助下完成進(jìn)入和回收���。該微型機器人在外加磁場和在水下組織粘附的條件下,可以實現(xiàn)多種運動模式��。利用胃模型證明了微型機器人的適應(yīng)性和可回收性��。結(jié)合超聲(US)成像���,在分離的小腸中顯示生物體的操作可行性。此外���,利用熒光成像系統(tǒng)確定了一種高效的靶向給藥方法�����。因此�����,本研究所提出的軟磁性微型機器人在醫(yī)學(xué)上具有巨大的應(yīng)用潛力�����。
相關(guān)研究內(nèi)容以“Catheter-Assisted Bioinspired Adhesive Magnetic Soft Millirobot for Drug Delivery”為題于2023年10月25日發(fā)表在《Small》上���。
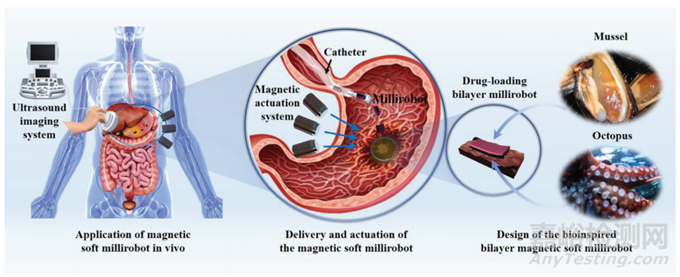
示意圖 生物啟發(fā)磁力微型機器人原理圖及其生物醫(yī)學(xué)應(yīng)用
本文利用PDA水凝膠和磁性粒子摻雜的聚二甲基硅氧烷(PDMS)開發(fā)了一種軟粘接劑磁性微型機器人。該微型機器人通過以一種可重構(gòu)的方式拉伸自己來適應(yīng)環(huán)境��。如示意圖所示�����,微型機器人通過粘附“快速通道”導(dǎo)管���,有效地進(jìn)入人體深層和狹窄的空間,脫離導(dǎo)管���,不造成損傷。這防止了與人體復(fù)雜流體環(huán)境的直接接觸��,并使微型機器人能夠穿過崎嶇不平和復(fù)雜的器官��。
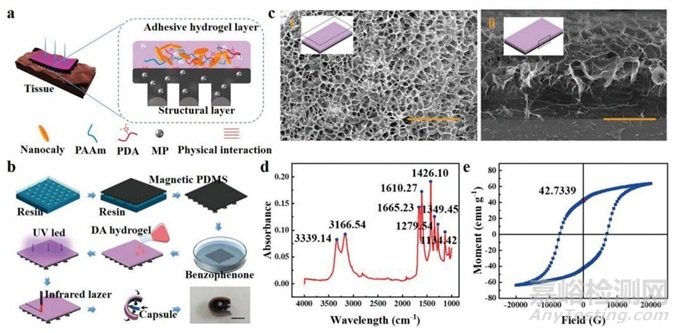
圖1 多層微型機器人的制造與表征
圖1a顯示了一個軟磁性微型機器人的詳細(xì)結(jié)構(gòu)���。多層微型機器人由磁性PDMS粘合劑層和生物粘附水凝膠層組成。利用三維打印樹脂模具固化結(jié)構(gòu)磁性PDMS��,制作磁性吸盤陣列結(jié)構(gòu)層(圖1b)���。掃描電鏡(SEM)圖像(圖1ci)顯示,該微型機器人的親水水凝膠具有緊湊���、均勻的多孔結(jié)構(gòu)���,為載藥提供足夠的空間���,使該水凝膠具有良好的載藥能力(圖1c i)���。側(cè)剖面顯示���,親水水凝膠與磁性PDMS界面緊密結(jié)合(圖1c ii)���。在1665.23cm−1處��,一個與酰胺基C═O相關(guān)的顯著峰表明丙烯酰胺基的存在(圖1d)��。接著描述了磁性PDMS層的磁化強度(圖1e)。磁滯回線具有較大的剩余力和強制力�����,因此可以在外加磁場的作用下有效地驅(qū)動磁性微型機器人���。
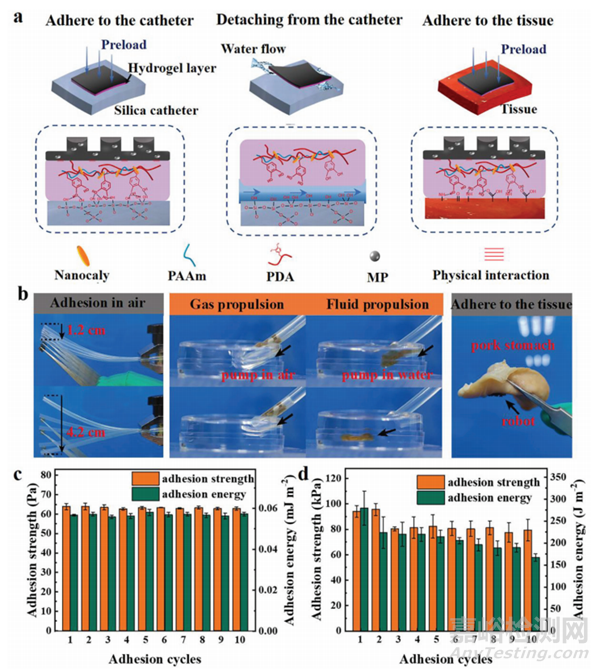
圖2 多層微型機器人膠層的膠粘機理及性能
這個微型機器人可以通過向?qū)Ч苤凶⑸渖睇}水來釋放。圖2a顯示雙分子層微機器人的生物粘附層與導(dǎo)管的粘附���,由電流沖刷引發(fā)的分離���,以及與生物組織的粘附。圖2b顯示微型機器人的不同層與空氣中導(dǎo)管的附著力��,并附著在豬的胃表面。水凝膠在空氣中具有較高的粘附強度和粘附能�����,在初始重復(fù)粘附過程中能保持較強的粘附性能(圖2c)。而在水中粘附強度和能量顯著下降(圖2d)���。本研究方法利用水凝膠在空氣中的優(yōu)良附著力和在水中的低附著力的區(qū)別�����,實現(xiàn)微型機器人的加載和釋放。
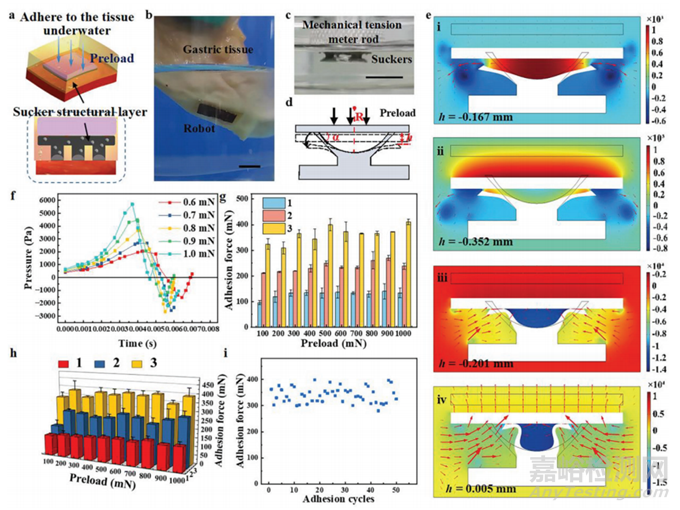
圖3 多層微型機器人磁性吸盤結(jié)構(gòu)層的粘附機理及性能
本研究利用3D打印模板設(shè)計并制作一個磁性吸盤結(jié)構(gòu)層��,在體液中��,微型機器人的吸盤結(jié)構(gòu)側(cè)面對生物表面���,在磁力的作用下實現(xiàn)吸附(圖3a)。該微型機器人可以很好地吸附在水下組織表面���,并在振動干擾下保持附著���,模仿患者的日常活動(圖3b)��。通過控制張力機��,在預(yù)加載的條件下�����,測量微型機器人吸盤結(jié)構(gòu)層的吸附力��,在桿下按壓時�����,吸盤的變形如圖3c所示��。吸盤在下壓桿過程中的變形如圖3d所示��。圖3e為在600 mN預(yù)載荷下下壓拉玻璃片過程中吸盤及周圍流體狀態(tài)的模擬結(jié)果。圖3f顯示不同預(yù)載荷下吸盤內(nèi)部壓力的變化�����,預(yù)負(fù)荷在0.005 s時反轉(zhuǎn)。預(yù)載大于100 mN形成的玻璃襯底的吸附力相似��,單個吸盤形成的平均吸附力為120mN(圖3g)�����。水下對軟生物組織的粘附得出相同結(jié)論(圖3h)。接著還驗證吸盤結(jié)構(gòu)層表現(xiàn)出良好的重復(fù)性(圖3i)��。在重復(fù)水下粘附50次后���,微型機器人的粘附力沒有下降趨勢。
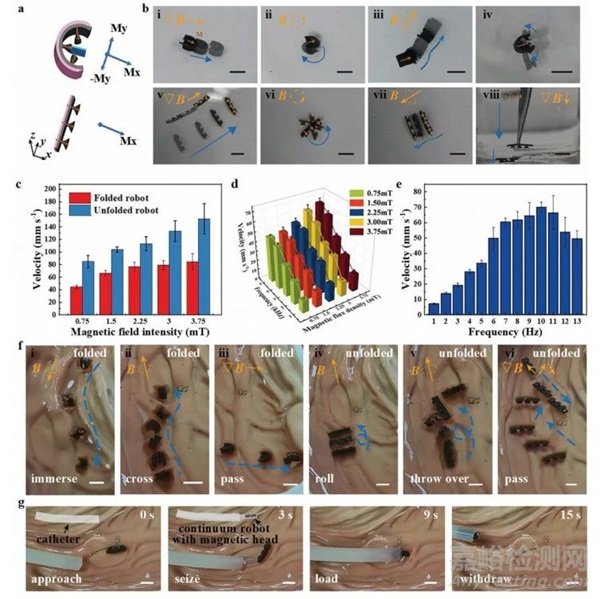
圖4 多種磁性運動模式和體外實驗
圖5 微型機器人的多種磁性運動模式和體外實驗
除了通過導(dǎo)管輸送外���,該微型機器人還可以被磁性引導(dǎo)到目標(biāo)區(qū)域。由于在PDMS固化過程中施加的強外磁場的磁化���,微型機器人表現(xiàn)出鐵磁性(圖4a)�����。在圖4b中���,藍(lán)色箭頭表示磁控制運動過程中的運動軌跡,黃色符號表示外部驅(qū)動磁場(梯度��、旋轉(zhuǎn)和翻滾磁場)���。在折疊和展開狀態(tài)下�����,微型機器人的速度隨著外部磁場強度的增加而增加(圖4c)�����。在滾動運動中��,折疊狀態(tài)下的微型機器人的速度隨著外場強的增加而增加,并且在1-5Hz范圍內(nèi)隨頻率呈增加的趨勢(圖4d)��。在展開狀態(tài)下��,在1-10hz范圍內(nèi)���,其滾動速度也隨頻率呈上升趨勢���,而當(dāng)頻率為大于10 Hz時,就會出現(xiàn)不受控制的失步現(xiàn)象�����,導(dǎo)致速度下降(圖4e)���。處于折疊狀態(tài)的微型機器人可以在潮濕的環(huán)境中滾入水中(圖4f i)。微型機器人可以通過滾動運動穿過胃折疊���,并以平折疊滾動(圖4f ii、iv�����、v)�����。圖4f iii�����、vi顯示��,微型機器人可以依靠磁力在水下快速平移��。使用磁性連續(xù)體機器人的導(dǎo)管取出微型機器人的過程如圖4g所示���。
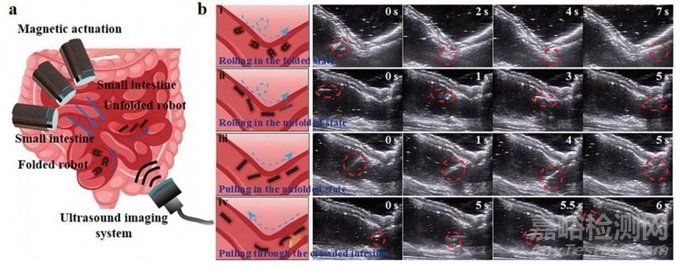
磁力微型機器人在體外證實了其在豬腸道內(nèi)的生物可操作性(圖5a)。該微型機器人最初被放置在豬小腸左端��,圖5b i顯示一個折疊的微型機器人在一個滾動的磁場下沿著小腸壁滾動�����,穿過小腸的轉(zhuǎn)折點��。隨著膠囊殼的膨脹�����,微型機器人自行折疊��,但它仍然可以沿著腸壁自由地向前滾動(圖5b ii)��。微型機器人在磁場的作用下平移�����,以一定角度旋轉(zhuǎn)后改變平移方向通過轉(zhuǎn)彎(圖5b iii)�����。雖然腸道被食物碎片等物體充血�����,但由于身體靈活而薄��,微型機器人仍然可以在大磁場的作用下通過腸道(圖5b iv)��。結(jié)合實時臨床成像設(shè)備,可以觀察到微型機器人在體內(nèi)的運動��,這是微型機器人在體內(nèi)醫(yī)學(xué)應(yīng)用的基本前提���。
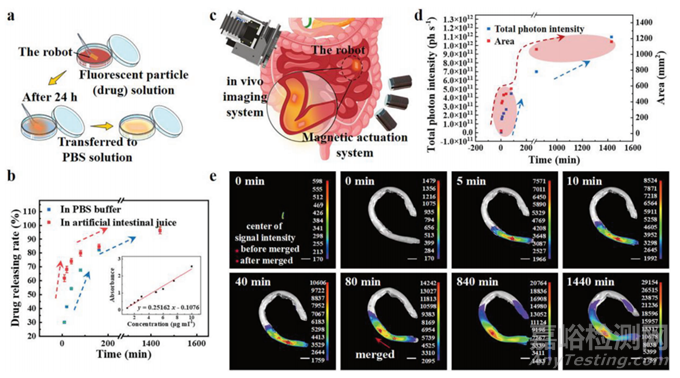
圖6 該微型機器人的體外實驗及高效的靶向藥物釋放應(yīng)用
使用羅丹明熒光納米珠作為標(biāo)記物來可視化藥物擴散的狀態(tài)(圖6a)。使用紫外-可見近紅外分光光度計校準(zhǔn)藥物濃度和吸光度之間的關(guān)系���,并測量釋放藥物的濃度(圖6b)��。使用體內(nèi)成像系統(tǒng)獲得熒光圖像和亮場照片(圖6c)�����。熒光粒子的總光子強度和可檢測擴散面積如圖6d所示��。圖6e顯示��,可以檢測到裝入微型機器人藥物的熒光信號�����。因此���,微型機器人與臨床成像設(shè)備結(jié)合,在體內(nèi)醫(yī)療應(yīng)用方面具有相當(dāng)大的潛力��。
綜上所述�����,本研究提出了一種新的微型機器人設(shè)計���,以靶向�����、長期的藥物釋放在體內(nèi)�����。將粘合劑材料和結(jié)構(gòu)的優(yōu)點應(yīng)用到機器人技術(shù)領(lǐng)域,解決了在臨床實踐中應(yīng)用醫(yī)學(xué)微型機器人時不可忽視的關(guān)鍵問題�����。在這項研究中設(shè)計了一個軟磁性機器人��,它可以通過導(dǎo)管輸送到人體���,并被操縱錨定到組織的目標(biāo)區(qū)域,用于醫(yī)療應(yīng)用���。該機器人由貽貝啟發(fā)的水凝膠層和磁性吸盤結(jié)構(gòu)層組成,因此它具有不同粘附機制的雙層粘附表面�����。本研究利用該粘合劑水凝膠在空氣和水下的可變粘附強度,使微型機器人能夠通過導(dǎo)管實現(xiàn)快速��、無損傷的輸送�����?��?諝庵袕姶蟮恼掣椒乐馆斔瓦^程中分離,而水中較弱的粘附強度確?��?刂?��、無損的釋放。磁吸盤結(jié)構(gòu)層使機器人能夠在外部磁場下以各種運動模式進(jìn)行內(nèi)部導(dǎo)航�����,機器人在負(fù)壓展開后也能粘附在組織表面�����。本研究模擬了豬腸道內(nèi)的生物環(huán)境,并利用US成像證明機器人內(nèi)部操作的可行性���。此外���,結(jié)合體內(nèi)成像系統(tǒng)驗證了該微型機器人在體內(nèi)的靶向性和藥物釋放能力�����。為了設(shè)計更多治療場景的機器人���,可生物降解材料無疑是首選���。未來對機器人結(jié)構(gòu)和材料的改進(jìn)可以實現(xiàn)更有效的運動模式和增強的降解性。
文章來源:https://doi.org/10.1002/smll.202306510