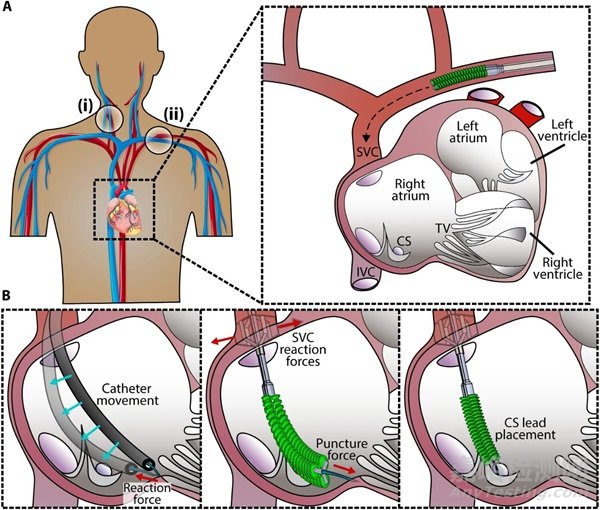
在微創(chuàng)血管內(nèi)手術(shù)中����,外科醫(yī)生依靠低靈活度和高縱橫比的導(dǎo)管來(lái)達(dá)到解剖目標(biāo)�。然而,心臟跳動(dòng)的內(nèi)部環(huán)境對(duì)幾個(gè)解剖位置提出了獨(dú)特的挑戰(zhàn)�����,使得醫(yī)生難以靈活地操縱介入工具并對(duì)心臟內(nèi)相應(yīng)目標(biāo)施加足夠的力���。
近期����,來(lái)自Boston University的Tommaso Ranzani團(tuán)隊(duì)在《Science Advances 》雜志上發(fā)表題為“A multifunctional soft robot for cardiac interventions”的封面文章���,展示了一種毫米級(jí)的軟機(jī)器人平臺(tái)��,它可以在心臟入口處部署和自穩(wěn)定�,并引導(dǎo)現(xiàn)有的介入工具達(dá)到目標(biāo)位置。在右心房?jī)?nèi)的兩例示范心內(nèi)手術(shù)中���,機(jī)器人平臺(tái)提供了足夠的靈活性來(lái)到達(dá)多個(gè)解剖目標(biāo)�,足夠的穩(wěn)定性來(lái)保持與運(yùn)動(dòng)目標(biāo)的持續(xù)接觸�����,以及足夠的機(jī)械結(jié)構(gòu)來(lái)產(chǎn)生牛頓級(jí)別的力����。該設(shè)備解決了目前微創(chuàng)心內(nèi)介入的挑戰(zhàn),它使基于導(dǎo)管的心臟介入手術(shù)有了更長(zhǎng)遠(yuǎn)的發(fā)展�。
圖1 設(shè)備的臨床工作應(yīng)用流程
1. 血管內(nèi)穩(wěn)定機(jī)構(gòu)
研究人員使用圖2A所示的逐層工藝制造穩(wěn)定組件。首先��,分別對(duì)半剛性彈簧鋼和柔性聚酰亞胺薄膜進(jìn)行激光切割�����;使用生物相容的粘合劑將這些層粘合在一起�����,形彈簧鋼夾聚酰亞胺薄膜的層壓板;最后�,在層壓板上涂上一層柔軟的熱塑性聚氨酯(TPU)層,進(jìn)行切割���。將層壓板包裹在一個(gè)3打印的多腔管周?chē)?圖2A)��。多腔管中有用于驅(qū)動(dòng)軟機(jī)器人的三條流體管路和用于展開(kāi)穩(wěn)定機(jī)構(gòu)的兩根鮑登線(xiàn)。穩(wěn)定機(jī)構(gòu)可從收縮態(tài)的8mm直徑擴(kuò)展為32mm�。TPU外殼可以?xún)?chǔ)存彈性勢(shì)能,使得穩(wěn)定機(jī)構(gòu)在未工作時(shí)處于折疊狀態(tài)�。圖2B展示了穩(wěn)定機(jī)構(gòu)介入豬的上腔靜脈后,將其移動(dòng)不同距離產(chǎn)生的徑向力和軸向力�����,圖2C則測(cè)試了穩(wěn)定機(jī)構(gòu)展開(kāi)后對(duì)靜脈內(nèi)血液的流體阻力��,并和球囊導(dǎo)管進(jìn)行了對(duì)比����,表明穩(wěn)定機(jī)構(gòu)的介入不會(huì)對(duì)血流造成阻礙。為了確定安全性��,研究人員測(cè)量了拉伸鮑登線(xiàn)驅(qū)動(dòng)穩(wěn)定機(jī)構(gòu)張開(kāi)時(shí)對(duì)靜脈管腔產(chǎn)生的力,并將測(cè)試結(jié)果輸入到Abaqus中模擬計(jì)算應(yīng)力集中�,得到當(dāng)鮑登線(xiàn)的最大張力為 1.91 N 時(shí),穩(wěn)定機(jī)構(gòu)產(chǎn)生 1.21 N 的徑向力�����,該徑向力在靜脈上產(chǎn)生最大為 0.898 MPa的集中應(yīng)力(圖2D)��,并在最后解剖了實(shí)驗(yàn)過(guò)后的豬靜脈����,在顯微鏡下觀察到內(nèi)皮沒(méi)有破損。
圖2 穩(wěn)定機(jī)構(gòu)的設(shè)計(jì)�、制造與表征
2. 軟體機(jī)器人的介入引導(dǎo)
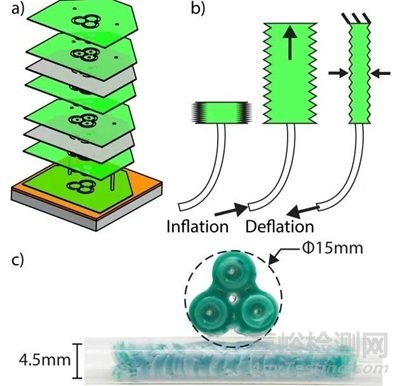
研究人員使用了一種之前研發(fā)的堆疊式球囊制動(dòng)器(SBA)的軟體機(jī)器人來(lái)引導(dǎo)手術(shù)器械,該軟體機(jī)器人具有大膨脹比和高作用力的優(yōu)點(diǎn)��。該末端執(zhí)行器由TPE(熱塑性彈性體)和聚四氟乙烯(PTFE)兩種材料熱壓制成����,可以沿軸向壓縮(圖3a、b)���。根據(jù)需要達(dá)到的長(zhǎng)度對(duì)球囊單元進(jìn)行堆疊���,共堆疊了20層�, 1mm厚的壓縮球囊完全充氣后可以膨脹為40mm�。為了滿(mǎn)足可進(jìn)入靜脈腔體的直徑,可以在充氣后固定軟體機(jī)器人的長(zhǎng)度��,再進(jìn)行放氣���,以徑向壓縮球囊(圖3b)���,可以將直徑為 15 mm 的三腔球囊徑向壓縮至最小直徑 4.5 mm(圖3c)
圖3 軟體機(jī)器人制造和徑向壓縮
3. 集成機(jī)器人平臺(tái)
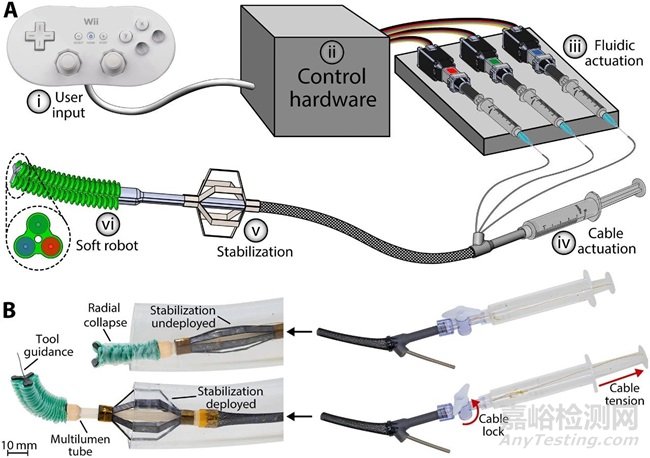
如圖4為該集成的軟體機(jī)器人平臺(tái),首先將軟體機(jī)器人連接到穩(wěn)定機(jī)構(gòu)的3D打印多腔管上���,用生物粘合劑將軟體機(jī)器人粘在單層不銹鋼基板上,再將基板粘在多腔管上 (圖2a)�。然后將該組件連接到一段30cm長(zhǎng)的網(wǎng)狀線(xiàn)纜上,該網(wǎng)狀線(xiàn)纜包含三個(gè)流體管路和兩個(gè)鮑登線(xiàn)纜��,并且中間還有一段聚四氟乙烯管腔�,可用于通過(guò)放置傳統(tǒng)的手術(shù)器械,如導(dǎo)絲和導(dǎo)管���。在介入機(jī)器人的控制端��,定制的打印部件將鮑登線(xiàn)纜終端從中央通道和流體管路中分離出來(lái)(圖4A)��。中央通道可在任意位置允許用戶(hù)插入手術(shù)器械���,而流體管路連接到定制的注射器泵上����,鮑登線(xiàn)被送入帶有魯爾鎖閥連接器的注射器中�,通過(guò)拉動(dòng)注射器并鎖定閥門(mén),夾緊鮑登線(xiàn)���,從而展開(kāi)穩(wěn)定機(jī) (圖4B)���。
圖4 集成的軟體機(jī)器人平臺(tái)
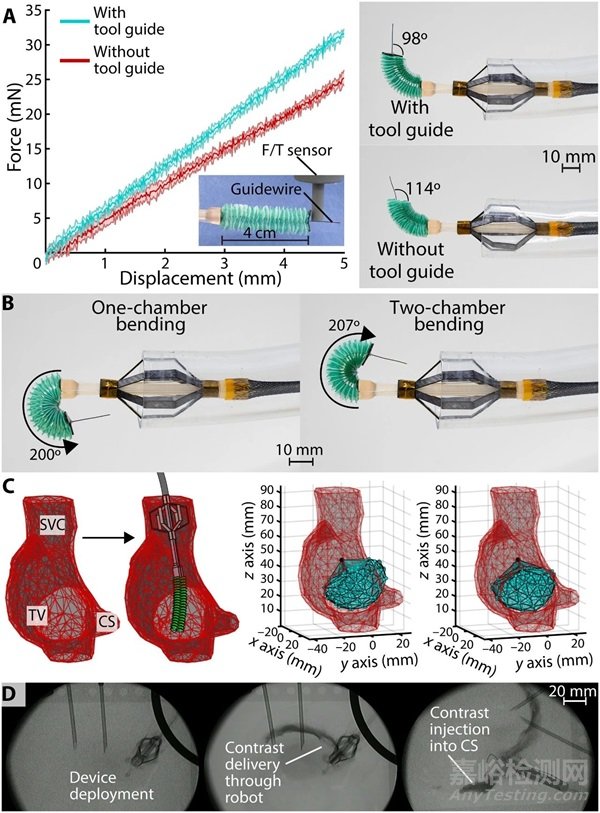
研究人員在軟體機(jī)器人的尖端安裝了2D工具導(dǎo)向器,以增加系統(tǒng)在引導(dǎo)介入工具時(shí)的硬度和精度(圖5A和B)�����。工具導(dǎo)向器使用與穩(wěn)定機(jī)構(gòu)相同的制造方法�。三個(gè)單向彎曲接頭允許工具導(dǎo)向器在軟機(jī)器人的徑向折疊過(guò)程中向內(nèi)折疊(圖4B)。圖5A展示了工具導(dǎo)向器對(duì)遠(yuǎn)端工具剛度和精度的提升效果�,組件剛度可達(dá)6.3mN/mm,并能在軟體機(jī)器人彎曲到90°時(shí)使工具與水平方向成97.8°的角度���。
4. 軟體機(jī)器人的工作空間
研究人員演示了軟體機(jī)器人的工作空間的極端情況��,將0.35毫米導(dǎo)絲的柔性端插入其工作通道�,一個(gè)流體腔體充氣,另外兩個(gè)腔體放氣的情況下���,機(jī)械手可以彎曲到200°��;在雙腔彎曲情況下�����,可彎曲到207° (圖5B)����。圖5C則通過(guò)運(yùn)動(dòng)解算和心臟的計(jì)算機(jī)斷層掃描模型確定了該機(jī)器人可以滿(mǎn)足臨床手術(shù)的工作位置要求���。圖D表明該設(shè)備在X射線(xiàn)透視下可視,可用于注射造影液實(shí)現(xiàn)對(duì)心臟管狀靜脈的可視化�����。
圖5 集成機(jī)器人的主要特征
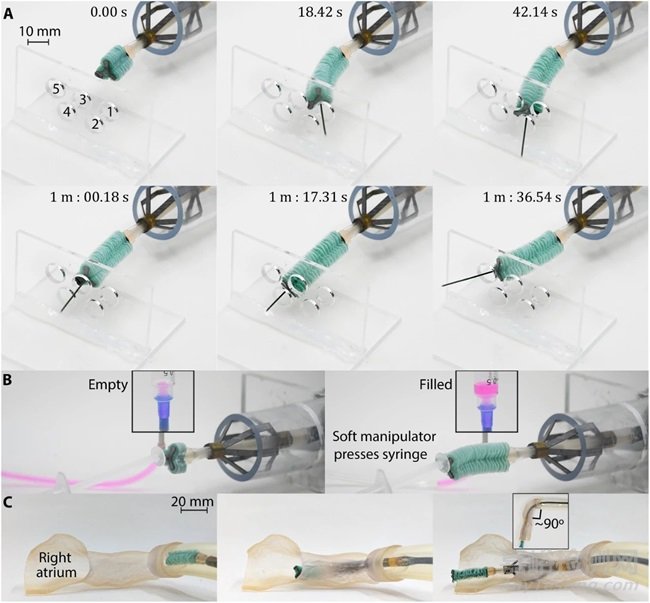
5. 體外演示實(shí)驗(yàn)
該裝置被部署在直徑25毫米的透明管中進(jìn)行演����。首先��,要求軟體機(jī)器引導(dǎo)一根0.9毫米的導(dǎo)絲依次穿過(guò)一塊距離4cm的亞克力上五個(gè)直徑為1cm的孔 (圖6A)����,該操作計(jì)時(shí)90s完成,展示了軟體機(jī)器人的靈巧性�����。下面����,要求軟體機(jī)器人按下注射器柱塞(圖6B),注射器內(nèi)裝滿(mǎn)了紅色墨水�,展示了軟體機(jī)器人尖端能夠產(chǎn)生足夠的力。圖6C展示了機(jī)器人平臺(tái)可以通過(guò)外周血管系統(tǒng)����,如鎖骨下靜脈,穿過(guò)≈90°彎曲腔道進(jìn)入右心房��。
圖6 集成機(jī)器人平臺(tái)的體外演示
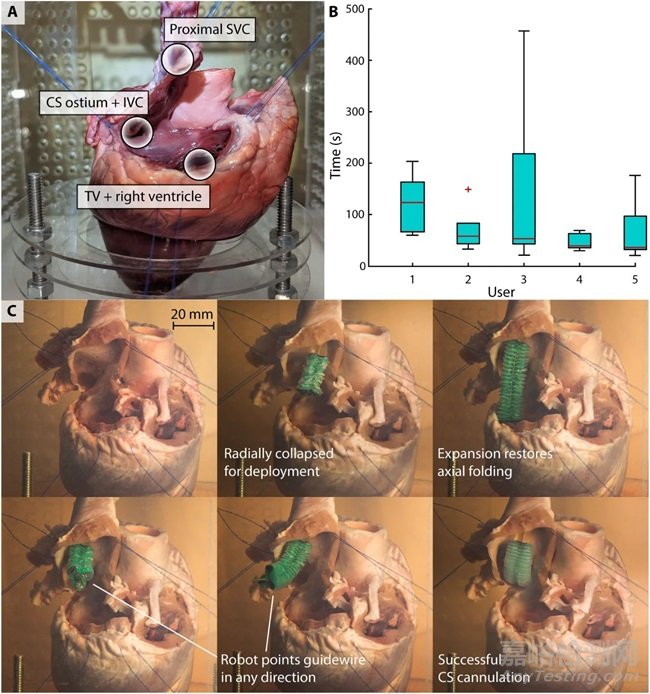
6. 模擬手術(shù)實(shí)驗(yàn)
為了進(jìn)一步展示軟體機(jī)器人的臨床應(yīng)用��,研究人員在離體環(huán)境下展示了兩例示范手術(shù):冠狀竇插管術(shù)�、三尖瓣環(huán)穿刺術(shù)。主要通過(guò)記錄手術(shù)所用時(shí)間以及對(duì)心臟軟組織的損傷來(lái)評(píng)估手術(shù)效果。冠狀竇插管術(shù)(圖7C)各使用者完成手術(shù)的總體平均時(shí)間為 68 ± 37 s����。三尖瓣環(huán)穿刺術(shù)各使用者完成手術(shù)的總體平均時(shí)間為 84.0s。
圖7 冠狀竇插管術(shù)模擬手術(shù)
綜上所述����,研究人員開(kāi)發(fā)一個(gè)軟體機(jī)器人平臺(tái),以心臟跳動(dòng)環(huán)境下解決微創(chuàng)心內(nèi)干預(yù)手術(shù)面臨的臨床挑戰(zhàn)��。該平臺(tái)能夠折疊并鎖定在近端上腔靜脈處并實(shí)現(xiàn)機(jī)構(gòu)穩(wěn)定���,并通過(guò)軟機(jī)器人操縱器引導(dǎo)介入工具達(dá)到右心房的目標(biāo)位置�����,并傳遞與匹配生物組織所需的力����。最后通過(guò)兩例示范性手術(shù)的離體測(cè)試展示了該軟體機(jī)器人平臺(tái)在臨床手術(shù)中的應(yīng)用前景
文章來(lái)源:https://www.science.org/doi/10.1126/sciadv.adi5559