導(dǎo) 語(yǔ)
近日��,北卡羅來(lái)納大學(xué)的研究人員針對(duì)下肢假肢的直接控制����,探討了使用運(yùn)動(dòng)單元放電能否提高下肢踝關(guān)節(jié)運(yùn)動(dòng)意圖解碼的準(zhǔn)確性�����。研究表明�����,利用膝下的完好肌肉和截肢殘余肌肉的肌電信號(hào)��,運(yùn)動(dòng)單元放電可以準(zhǔn)確預(yù)測(cè)踝關(guān)節(jié)等距背屈和跖屈的扭矩��。相關(guān)成果發(fā)表在《IEEE Transactions on Neural Systems and Rehabilitation Engineering》雜志上�����。
1��、研究背景
動(dòng)力下肢假肢通過(guò)自主操作協(xié)助用戶進(jìn)行各種生物力學(xué)上定義明確的周期性運(yùn)動(dòng)�����,具備改善下肢截肢患者活動(dòng)能力的潛力����。然而,對(duì)于許多涉及復(fù)雜或獨(dú)特生物力學(xué)的日?����;顒?dòng)(如坐到站或蹲)和娛樂(lè)活動(dòng)(如自由式舞蹈和攀巖等)��,由于存在動(dòng)態(tài)的姿勢(shì)調(diào)整��,自主控制器難以考慮到用戶適當(dāng)調(diào)整肢體動(dòng)力學(xué)的意愿����,導(dǎo)致其預(yù)編程具有挑戰(zhàn)性。
為了應(yīng)對(duì)這一挑戰(zhàn)����,通過(guò)神經(jīng)-機(jī)器接口直接將用戶的運(yùn)動(dòng)意圖集成到輔助和康復(fù)設(shè)備的驅(qū)動(dòng)控制中����。由于可以提供無(wú)創(chuàng)和直接的設(shè)置,表面肌電圖是神經(jīng)假肢控制的一種主要選擇�����。在使用直接連續(xù)的肌電控制假肢時(shí),肌肉活動(dòng)通常被量化為肌電圖的幅值�����,這是神經(jīng)運(yùn)動(dòng)控制命令的粗略估計(jì)��。肌電圖是運(yùn)動(dòng)單元(MU)動(dòng)作電位(MUAP)和相應(yīng)放電時(shí)間的卷積�����。當(dāng)使用肌電振幅表示神經(jīng)驅(qū)動(dòng)時(shí)����,重疊的MUAP被抵消,導(dǎo)致信號(hào)損失����。使用MU放電可以緩解重疊MUAP抵消帶來(lái)的信號(hào)損失和噪聲干擾。因此����,在解碼神經(jīng)肌肉控制并估計(jì)用戶的預(yù)期關(guān)節(jié)扭矩方面,使用MUAP和脈沖序列可能比傳統(tǒng)肌電振幅更精確。
雖然對(duì)下肢肌電假肢的研究不斷增加����,但是很少有研究探討基于肌電圖和基于MU的下肢連續(xù)運(yùn)動(dòng)意圖解碼在完好肌肉和截肢殘余肌肉中的準(zhǔn)確性差異。為了填補(bǔ)這一知識(shí)空白����,這項(xiàng)研究要求膝關(guān)節(jié)以下截肢者和未截肢者調(diào)節(jié)完好和殘余踝關(guān)節(jié)背屈肌和跖屈肌的激活。在分析中����,研究人員比較了三種解碼器在估計(jì)踝關(guān)節(jié)扭矩方面的準(zhǔn)確性?���;谑褂眠\(yùn)動(dòng)單元放電率表示神經(jīng)驅(qū)動(dòng)的優(yōu)勢(shì),研究人員假設(shè)基于運(yùn)動(dòng)單元的解碼器在完好和截肢殘余肌肉中都優(yōu)于肌電圖��。
2��、研究概述
基于功能化導(dǎo)電聚合物的設(shè)計(jì)�����,研究團(tuán)隊(duì)設(shè)計(jì)了功能化聚苯胺基時(shí)序黏附水凝膠貼片��。它可以實(shí)現(xiàn)心臟的同步機(jī)械生理監(jiān)測(cè)和電耦合治療�����,并牢固附著在心臟表面監(jiān)測(cè)心臟的機(jī)械運(yùn)動(dòng)和電活動(dòng)����。
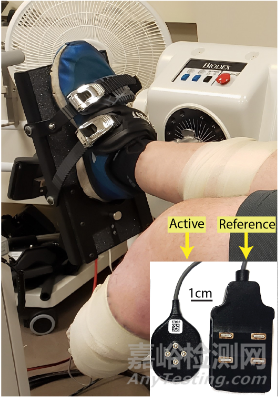
這項(xiàng)研究共招募了8名未截肢者(NON)和7名截肢者(AMP)參與實(shí)驗(yàn)�����。使用4個(gè)表面電極(Galileo, Delsys, Inc., Natick, MA)采集肌電圖��。電極放置在每側(cè)肢體的脛骨前肌(TA)和外側(cè)腓腸肌(GA)上�����。AMP的完好肢體被固定在附加設(shè)備上�����,腳踝平行于測(cè)力計(jì)的旋轉(zhuǎn)軸(System 4 Pro, Biodex, Shirley, NY)�����。NON在相同的配置下分別進(jìn)行雙側(cè)肢體的實(shí)驗(yàn)。
圖1:實(shí)驗(yàn)設(shè)置(圖片來(lái)自原文)
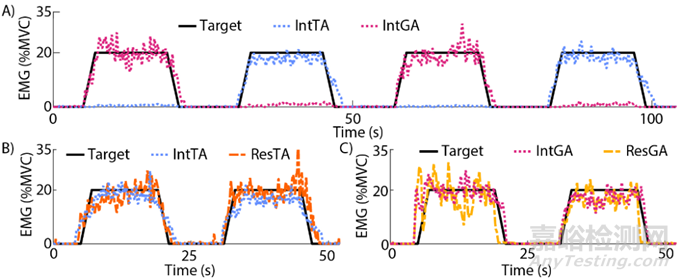
受試者通過(guò)追蹤TA和GA的目標(biāo)肌肉活動(dòng)����,進(jìn)行等距背屈和跖屈,同時(shí)記錄踝關(guān)節(jié)扭矩����。為了匹配假肢和完好肢體的活動(dòng),AMP用殘余的TA和GA反映肌肉激活��。
圖2:AMP2完成的代表性實(shí)驗(yàn)任務(wù)(圖片來(lái)自原文)
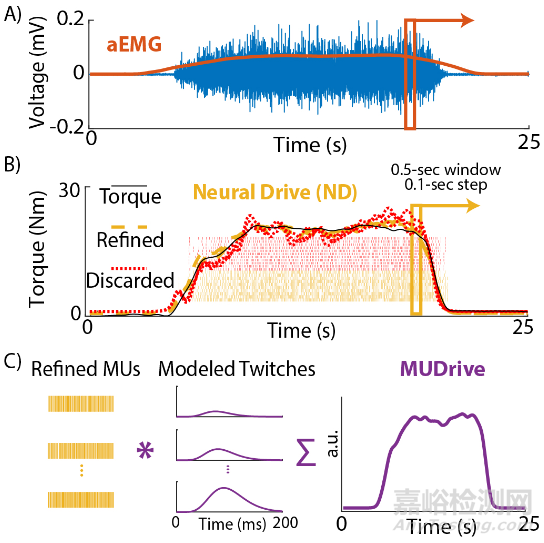
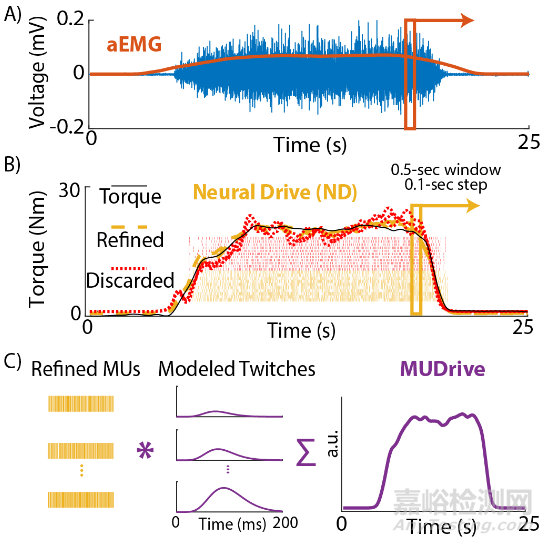
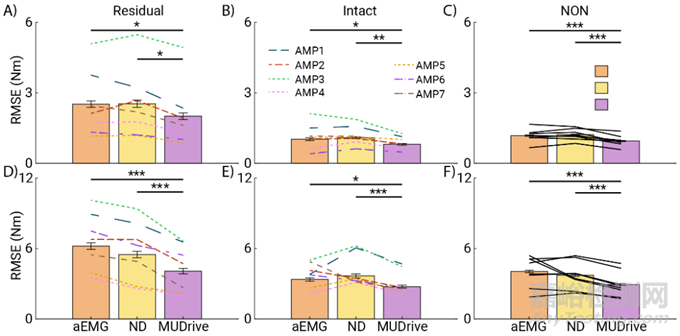
這項(xiàng)研究比較了基于:1)肌電振幅(aEMG)��;2)代表神經(jīng)驅(qū)動(dòng)的MU放電頻率(ND)��;3)MU放電與短時(shí)收縮力模型卷積(MUDrive)的用于踝關(guān)節(jié)扭矩估計(jì)的神經(jīng)肌肉解碼器(線性回歸)的準(zhǔn)確性��。
圖3:踝關(guān)節(jié)扭矩估計(jì)方法(圖片來(lái)自原文)
研究結(jié)果表明��,MUDrive在NON的肌群����、AMP的完好和殘余肌群中的表現(xiàn)均明顯優(yōu)于aEMG和ND方法。相比于輔助設(shè)備(如外骨骼和動(dòng)力假肢)的直接肌電控制�����,將MU放電與生物力學(xué)模型的輸出相結(jié)合,可能提供更準(zhǔn)確的扭矩控制信號(hào)�����。
圖4:踝關(guān)節(jié)扭矩估計(jì)結(jié)果(圖片來(lái)自原文)
3����、研究意義
這項(xiàng)研究證明了使用基于MU解碼的神經(jīng)接口來(lái)估計(jì)缺失關(guān)節(jié)扭矩并用于下肢假肢控制的可行性��?�;贛U的運(yùn)動(dòng)意圖解碼模型的應(yīng)用可能為動(dòng)力肌電假肢和神經(jīng)機(jī)器接口提供更精確的控制輸入信號(hào)�����。
參考文獻(xiàn):Rubin, N., Hinson, R., Saul, K., Hu, X., & Huang, H. (2023). Ankle Torque Estimation with Motor Unit Discharges in Residual Muscles following Lower-Limb Amputation. IEEE Transactions on Neural Systems and Rehabilitation Engineering. https://doi.org/10.1109/TNSRE.2023.3336543