導(dǎo) 語(yǔ)
近日瑞士洛桑聯(lián)邦理工學(xué)院生物機(jī)器人實(shí)驗(yàn)室團(tuán)隊(duì)提出了一種利用足部觸覺(jué)界面控制兩個(gè)額外機(jī)器人手臂的方法�,使得一名手術(shù)醫(yī)生可以在雙手雙腳的配合下�,同時(shí)操作四個(gè)腹腔鏡工具���,在獨(dú)立完成手術(shù)的同時(shí),降低任務(wù)負(fù)荷���,提升流暢度。相關(guān)研究成果發(fā)表在《The International Journal of Robotics Research》期刊上���。
1、研究背景
在許多外科手術(shù)場(chǎng)景中���,僅使用雙手不足以控制所有工具,因此需要助手輔助醫(yī)生同步操作�,這需要兩人之間努力保持同步�����,協(xié)調(diào)運(yùn)動(dòng),并預(yù)測(cè)彼此的需求�����。然而這種合作僅僅依靠口頭暗示�,會(huì)降低操作的流暢性���,還可能導(dǎo)致配合失誤�����。如今隨著輔助機(jī)械手和可穿戴外肢體的發(fā)展�����,人機(jī)協(xié)作可提升人并行多任務(wù)操作的能力���,有助于實(shí)現(xiàn)一人控制多種手術(shù)工具�。然而�,在上述場(chǎng)景中�����,如何實(shí)現(xiàn)自然���、流暢的交互仍然是一個(gè)懸而未決的問(wèn)題���。
現(xiàn)有研究表明:1)足部界面可以作為一種有效的替代輸入方式�,可用于控制機(jī)器人臂或其他輔助設(shè)備,同時(shí)不干擾人雙側(cè)上肢的固有運(yùn)動(dòng)���;2)與常見的直接控制方式相比,共享控制策略可以在提高機(jī)器人手術(shù)的安全性和效率的同時(shí)���,提升用戶的舒適度,降低負(fù)荷���。
本文提出了一種利用足部觸覺(jué)界面控制兩個(gè)機(jī)器人助手的方法�,包含兩種共享控制輔助模式:1)用于攝像頭導(dǎo)航的自適應(yīng)視覺(jué)跟蹤���;2)用于抓取物體的操作輔助,重點(diǎn)討論了上述共享策略的有效性及對(duì)減少操作者任務(wù)負(fù)荷和簡(jiǎn)化四臂任務(wù)的影響���。
2、研究概述
基于功能化導(dǎo)電聚合物的設(shè)計(jì)���,研究團(tuán)隊(duì)設(shè)計(jì)了功能化聚苯胺基時(shí)序黏附水凝膠貼片。它可以實(shí)現(xiàn)心臟的同步機(jī)械生理監(jiān)測(cè)和電耦合治療�����,并牢固附著在心臟表面監(jiān)測(cè)心臟的機(jī)械運(yùn)動(dòng)和電活動(dòng)�����。
1. 四臂系統(tǒng)
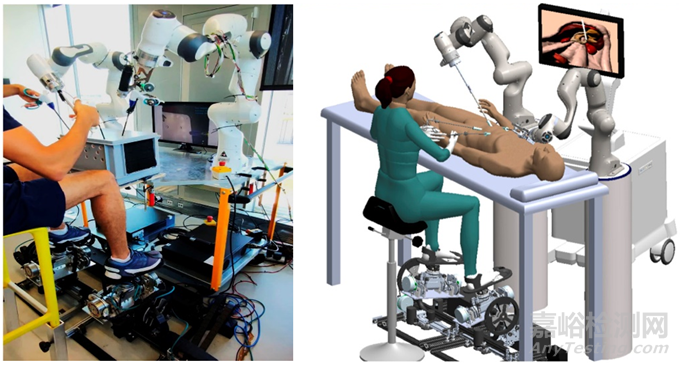
該研究首先構(gòu)建了一個(gè)具有觸覺(jué)反饋的四臂腹腔鏡手術(shù)系統(tǒng)�����,該系統(tǒng)使用兩個(gè)足部界面來(lái)控制兩個(gè)機(jī)器人臂,每個(gè)臂有五個(gè)自由度�,一個(gè)臂控制一個(gè)攝像頭���,另一個(gè)臂控制一個(gè)帶有電動(dòng)夾子的腹腔鏡工具,如圖1所示�。該系統(tǒng)使用二次規(guī)劃求解器來(lái)解決機(jī)器人臂的逆運(yùn)動(dòng)學(xué)問(wèn)題���,同時(shí)考慮了腹腔鏡手術(shù)�����、多臂控制和人機(jī)協(xié)作的任務(wù)和安全約束,如遠(yuǎn)端運(yùn)動(dòng)中心���、工作空間限制、臂間和人機(jī)碰撞控制等���,以實(shí)現(xiàn)碰撞感知�,保證人機(jī)安全。系統(tǒng)使用動(dòng)態(tài)系統(tǒng)框架來(lái)生成手術(shù)工具尖端的期望動(dòng)力學(xué)�����,包括線性速度和角速度。動(dòng)力學(xué)由人的輸入(即腳的姿態(tài))和工具的類型(攝像頭或夾具)決定�,并考慮了滑輪效應(yīng)和物理人機(jī)交互�。
除此之外,該系統(tǒng)還包括足部觸覺(jué)界面�,可以為操作者提供觸覺(jué)反饋���,包括抓取反饋���、可變阻抗反饋和引導(dǎo)反饋,以增強(qiáng)操作感知和控制精度�。本文創(chuàng)新地提出了兩種機(jī)器人輔助模式�����,分別是自適應(yīng)視覺(jué)跟蹤輔助和抓取輔助。自適應(yīng)視覺(jué)跟蹤針對(duì)攝像頭的導(dǎo)航�����,通過(guò)圖像處理和機(jī)器學(xué)習(xí)的方法�,實(shí)現(xiàn)對(duì)腹腔鏡工具的自動(dòng)識(shí)別和跟蹤�,從而減輕醫(yī)生的足部操作負(fù)擔(dān)�����。抓取輔助是針對(duì)夾具的操作�����,通過(guò)力傳感器和電機(jī)的控制,實(shí)現(xiàn)對(duì)物體的自動(dòng)抓取和釋放�����,從而簡(jiǎn)化醫(yī)生的足部控制操作�。
圖1:四臂腹腔鏡手術(shù)系統(tǒng)���。
術(shù)者保持坐位���,使用雙手進(jìn)行常規(guī)腹腔鏡檢查,同時(shí)雙腳遠(yuǎn)程操作兩個(gè)輔助機(jī)械臂執(zhí)行機(jī)器人手術(shù)任務(wù)�����。
(圖片來(lái)自原文)
2. 用戶驗(yàn)證評(píng)估
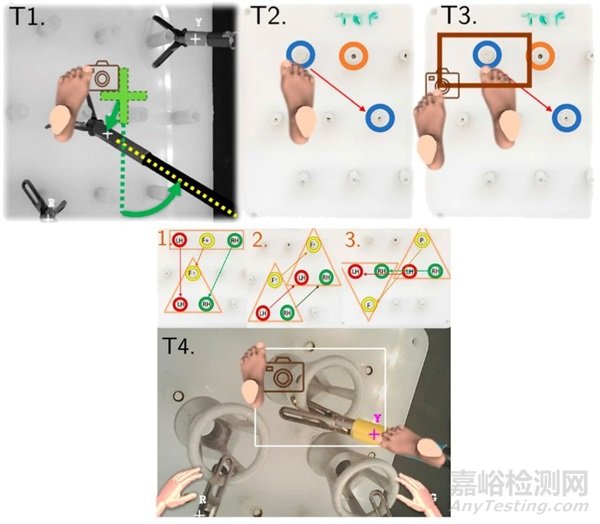
該研究對(duì)十二名受試者進(jìn)行了實(shí)驗(yàn),評(píng)估了系統(tǒng)的易用性和所提出的共享控制策略的有效性�。共設(shè)計(jì)了四種不同難度的腹腔鏡手術(shù)任務(wù)���,如圖2所示,難度由低到高分別為單腳視覺(jué)追蹤(T1)���、單腳工具操作(T2)、同時(shí)包括相機(jī)追蹤和工具操作的雙足任務(wù)(T3)�、以及同時(shí)包括相機(jī)追蹤和三臂操作的四臂任務(wù)(T4)�����。被試分別在無(wú)共享輔助策略(W.O.)和有共享輔助策略(W.GA.CA)的情況下執(zhí)行上述任務(wù)�����。為了研究輔助方式在不同任務(wù)中的效果���,定義了主觀和客觀指標(biāo)���。主觀指標(biāo)包括針對(duì)每個(gè)任務(wù)條件填寫的機(jī)器人使用感知問(wèn)卷和任務(wù)負(fù)荷指數(shù)問(wèn)卷���。客觀指標(biāo)包括完成時(shí)間�、成功率�����、失敗次數(shù)等。
圖2:不同難度的腹腔鏡手術(shù)任務(wù)�。
T1:視覺(jué)追蹤任務(wù)�;T2:單足操作任務(wù)�����;T3:雙足任務(wù)���,包括視覺(jué)任務(wù)和操作任務(wù)�����;T4:四臂任務(wù)�,包括視覺(jué)任務(wù)和三臂操作任務(wù)���。
(圖片來(lái)自原文)
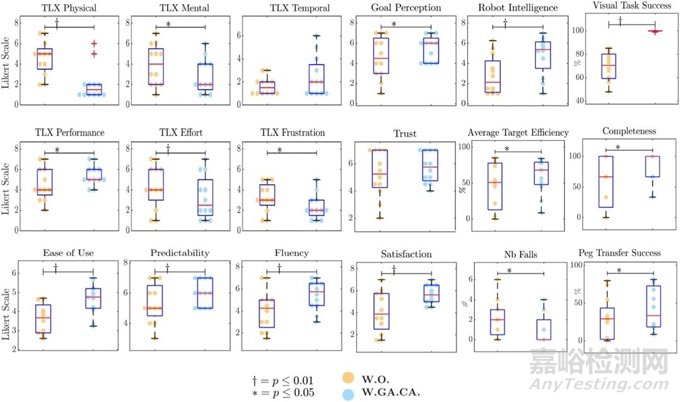
主要結(jié)果如下:1)共享控制對(duì)四手任務(wù)中的作用(如圖3所示)�。聯(lián)合使用抓取和視覺(jué)輔助顯著改善了絕大多數(shù)客觀指標(biāo)�,包括平均目標(biāo)效率和任務(wù)完成度顯著提升���,失敗次數(shù)顯著下降;在四手任務(wù)中視覺(jué)任務(wù)和工作操作任務(wù)的成功率同樣顯著提升�����。在主觀指標(biāo)中也獲得了類似的影響�����,在任務(wù)負(fù)荷方面,使用這兩種輔助模式顯著改善了定位和抓取動(dòng)作的心理需求�、努力���、挫折和表現(xiàn)���。在使用感知方面還顯著提高了流暢度指數(shù)���。
圖3:工具共享控制對(duì)四手任務(wù)(T4)主觀和客觀度量的影響
(圖片來(lái)自原文)
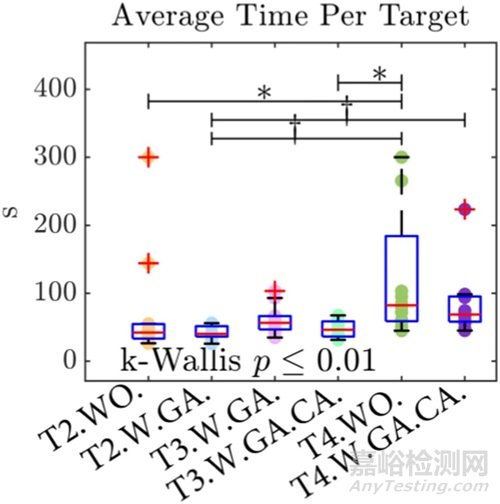
2)不同控制條件下的任務(wù)目標(biāo)精度和完成時(shí)間(如圖4所示)�。單腳視覺(jué)追蹤任務(wù)(T1)的平均位置誤差為(17.19 ± 10.51)px�,角度誤差為(4.35 ± 1.90)°���,任務(wù)完成時(shí)間為(22.72 ± 6.17)s。涉及操作的任務(wù)的中位目標(biāo)時(shí)間為:T2: 42.11s, T3: 56.39s, T4: 82.26s�����,當(dāng)沒(méi)有提供輔助時(shí)���,中位目標(biāo)時(shí)間為:T2: 40.20s, T3: 46.22s, T4: 68.63s。作為參考�,手控腹腔鏡手術(shù)培訓(xùn)時(shí)�,相同的操作任務(wù)的最大允許時(shí)間為50 s。這意味著在共享控制下�����,參與者在單足和雙足控制模式下可滿足腹腔鏡手術(shù)標(biāo)準(zhǔn)限度進(jìn)行腳操作�,但在四手情況下尚不滿足標(biāo)準(zhǔn)���。
圖4:任務(wù)目標(biāo)精度和完成時(shí)間
(圖片來(lái)自原文)
3���、研究意義
本文提出了一種利用足部觸覺(jué)界面控制兩個(gè)機(jī)器人助手的方法�,使得一名手術(shù)醫(yī)生可以同時(shí)操作四個(gè)腹腔鏡工具�,同時(shí)配以視覺(jué)追蹤輔助和抓握輔助兩種共享控制模式���,可有效降低使用者任務(wù)負(fù)荷���,提高性能�����,增加任務(wù)流暢性。本文證明了在單足�����、雙足和四臂設(shè)置下���,使用腳實(shí)現(xiàn)包括工具操作和目標(biāo)尋找或跟隨的標(biāo)準(zhǔn)腹腔鏡訓(xùn)練任務(wù)的可行性和系統(tǒng)的易習(xí)得性。本研究為未來(lái)提出新的手術(shù)方式�����、提高醫(yī)院的手術(shù)吞吐量從而提升醫(yī)院效率提供了可能性�。
參考文獻(xiàn):Hernandez Sanchez J, Amanhoud W, Billard A, et al. Enabling four-arm laparoscopic surgery by controlling two robotic assistants via haptic foot interfaces[J]. The International Journal of Robotics Research, 2023: 02783649231180366. DOI10.1177/02783649231180366