導(dǎo) 語(yǔ)
北京科技大學(xué)研究團(tuán)隊(duì)最近進(jìn)行了一項(xiàng)試點(diǎn)研究�,提出了一種創(chuàng)新的可變剛度氣動(dòng)致動(dòng)器���,增強(qiáng)了外骨骼驅(qū)動(dòng)器的彈性���。該技術(shù)的研發(fā)旨在解決當(dāng)前軟機(jī)器人手套多用于協(xié)助手指屈曲的局限性,對(duì)于因中風(fēng)后肌肉緊張而無(wú)法伸展手指的患者提供了有效的解決方案���。相關(guān)研究成果已在《IEEE ROBOTICS AND AUTOMATION LETTERS》上發(fā)表���。
1����、研究背景
手在日常生活中扮演著關(guān)鍵角色,但中風(fēng)常導(dǎo)致功能障礙����。傳統(tǒng)康復(fù)方法繁重昂貴,手部康復(fù)機(jī)器人應(yīng)運(yùn)而生����,但存在關(guān)節(jié)對(duì)準(zhǔn)和重量問(wèn)題。柔軟機(jī)器人手套備受關(guān)注�,其中氣動(dòng)致動(dòng)器是研究焦點(diǎn)����。然而���,現(xiàn)有致動(dòng)器難以滿(mǎn)足緊張肌肉患者的需求�。研究團(tuán)隊(duì)提出了一種新型氣動(dòng)致動(dòng)器�,利用多級(jí)鉸接彈性體和纖維增強(qiáng)致動(dòng)器。該致動(dòng)器通過(guò)調(diào)節(jié)真空壓力適應(yīng)不同肌肉緊張和康復(fù)階段�。設(shè)計(jì)集成在柔軟機(jī)器人手套中,可協(xié)助進(jìn)行康復(fù)手勢(shì)和抓握任務(wù)���。研究通過(guò)人工手模型驗(yàn)證了延展效果���,受試者的可穿戴評(píng)估展示了其在康復(fù)和日常任務(wù)中的潛力。
2�、研究概述
基于功能化導(dǎo)電聚合物的設(shè)計(jì),研究團(tuán)隊(duì)設(shè)計(jì)了功能化聚苯胺基時(shí)序黏附水凝膠貼片����。它可以實(shí)現(xiàn)心臟的同步機(jī)械生理監(jiān)測(cè)和電耦合治療,并牢固附著在心臟表面監(jiān)測(cè)心臟的機(jī)械運(yùn)動(dòng)和電活動(dòng)����。
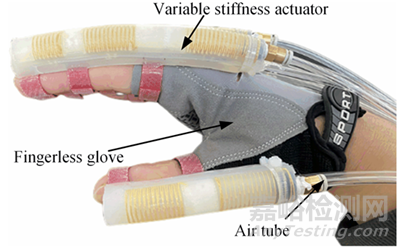
變剛度執(zhí)行器作為軟式機(jī)器人手套的關(guān)鍵組成部分���,其結(jié)構(gòu)設(shè)計(jì)直接影響到設(shè)備的性能。本論文介紹了變剛度致動(dòng)器的設(shè)計(jì)���,包括變剛度執(zhí)行機(jī)構(gòu)的結(jié)構(gòu)圖���、手指上的松散可變剛度室嵌入的纖維增強(qiáng)軟致動(dòng)器(MSAE),以及MSAE在真空壓力下提供高彈性的原理����。
圖1:變剛度軟體機(jī)器人手套
(圖片來(lái)自原文)
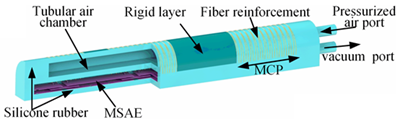
變剛度致動(dòng)器的結(jié)構(gòu)設(shè)計(jì)考慮到手的運(yùn)動(dòng)學(xué),具體而言����,它由纖維增強(qiáng)軟致動(dòng)器和變剛度部分組成(見(jiàn)圖2)���。纖維增強(qiáng)物與手指的三個(gè)關(guān)節(jié)相對(duì)應(yīng)�,而兩個(gè)剛性層則分別對(duì)應(yīng)中間和近端指骨�。在空氣壓縮進(jìn)入纖維增強(qiáng)致動(dòng)器時(shí),發(fā)生彎曲運(yùn)動(dòng)����??勺儎偠炔糠职度朐诳勺儎偠仁抑械亩嗉?jí)鉸接彈性體MSAE����,其結(jié)構(gòu)由三層彈簧鋼板通過(guò)繩索鉸接而成。這些層次中���,中間層與手指的三個(gè)指節(jié)相對(duì)應(yīng)����。MSAE的設(shè)計(jì)允許其在真空壓力下自由地達(dá)到致動(dòng)器的彎曲角度����,無(wú)需施加額外的壓力。
圖2:執(zhí)行機(jī)構(gòu)結(jié)構(gòu)圖
(圖片來(lái)自原文)
MSAE的工作模式包括低剛度模式和高剛度模式如圖3所示�。在低剛度模式下,MSAE處于松散狀態(tài)�,跟隨手指運(yùn)動(dòng)并不限制關(guān)節(jié)。這種模式適用于肌肉力量減弱或肌肉張力低的患者���。另一方面����,在高剛度模式下,通過(guò)施加真空壓力�,MSAE緊密貼合,提高整體致動(dòng)器的恢復(fù)力�。這種模式更適用于肌肉緊張度較高的患者,并可以通過(guò)調(diào)整真空壓力以適應(yīng)不同康復(fù)階段的需要����。
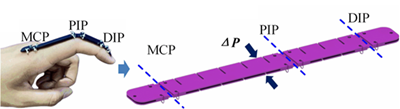
圖3:位于手指上的MSAE
(圖片來(lái)自原文)
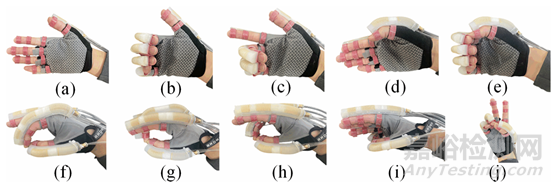
康復(fù)手勢(shì)測(cè)試如圖4所示。設(shè)計(jì)的康復(fù)手套展現(xiàn)出了卓越的靈活性����,能夠有效地支持典型的手勢(shì)。該手套使用戶(hù)能夠執(zhí)行廣泛的手指運(yùn)動(dòng)����,成功完成繁瑣的手指捏動(dòng)作,從而證明其在康復(fù)訓(xùn)練中具有顯著效果����。
圖4:典型康復(fù)手勢(shì)
(圖片來(lái)自原文)
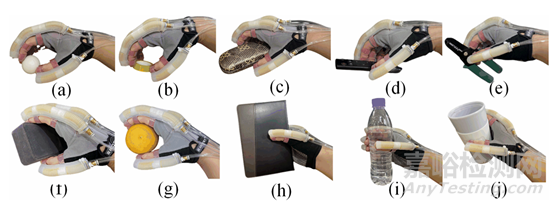
同時(shí),研究團(tuán)隊(duì)選擇了日常生活中的物體進(jìn)行抓握測(cè)試���,具體情況如圖5所示。通過(guò)這些測(cè)試����,研究者觀察到該軟質(zhì)機(jī)器人手套能夠靈活適應(yīng)各種大小和形狀的物體����。其出色的適應(yīng)性和表面附著力為用戶(hù)提供了有效的支持�,使其能夠更加輕松地進(jìn)行日常活動(dòng)�。
圖5:軟體機(jī)器人手套進(jìn)行抓握測(cè)試
(圖片來(lái)自原文)
3、研究意義
本研究介紹了一種基于纖維增強(qiáng)軟致動(dòng)器和多級(jí)鉸接彈性體的可變剛度致動(dòng)器���,旨在輔助中風(fēng)患者握緊拳頭后手部的伸展����。通過(guò)調(diào)整真空壓力����,該致動(dòng)器的剛度可適應(yīng)不同病情水平。研究團(tuán)隊(duì)開(kāi)發(fā)了分析模型�,量化了致動(dòng)器的彎曲特性,并通過(guò)物理實(shí)驗(yàn)和有限元模擬進(jìn)行驗(yàn)證����。測(cè)試結(jié)果顯示致動(dòng)器在任何初始狀態(tài)下都能保持穩(wěn)定的輸出力。對(duì)整個(gè)致動(dòng)器和單個(gè)關(guān)節(jié)進(jìn)行的剛度調(diào)諧性能測(cè)試表明�,致動(dòng)器實(shí)現(xiàn)了2.4倍的剛度變化�,并將實(shí)驗(yàn)結(jié)果與理論模型進(jìn)行了比較���。在單個(gè)關(guān)節(jié)測(cè)試中�,致動(dòng)器在關(guān)節(jié)阻力為6N時(shí)的變形阻力隨真空壓力增加而增加���,證明增加真空壓力和彈簧鋼片厚度可以提高致動(dòng)器剛度����,有利于手指伸展���。研究還展示了可變剛度致動(dòng)器在人工手模型上促進(jìn)手指伸展的能力����。最后���,五個(gè)致動(dòng)器集成的康復(fù)手套通過(guò)康復(fù)手勢(shì)和抓握測(cè)試���,滿(mǎn)足了日常手部康復(fù)訓(xùn)練的需求。
參考文獻(xiàn):Li X, Hao Y, Zhang J, et al. Design, Modeling and Experiments of a Variable Stiffness Soft Robotic Glove for Stroke Patients with Clenched Fist Deformity[J]. IEEE Robotics and Automation Letters, 2023. DOI:10.1109/LRA.2023.3279613