目前大型特種設(shè)備的表面缺陷檢測(cè)主要依靠傳統(tǒng)人工檢測(cè)方式����,該方式需要進(jìn)行攀登作業(yè)并通過(guò)檢測(cè)儀器或目視檢查有無(wú)明顯缺陷,若存在顏色對(duì)比不突出的小裂紋或缺陷���,容易出現(xiàn)漏檢��,檢測(cè)時(shí)間過(guò)長(zhǎng)也會(huì)導(dǎo)致檢測(cè)人員勞累等問(wèn)題�����,故一方面檢測(cè)準(zhǔn)確率較低�����,另一方面人工檢測(cè)效率不高���。加上現(xiàn)場(chǎng)高空、高溫��、粉塵����、大風(fēng)等惡劣環(huán)境影響�,傳統(tǒng)檢測(cè)方式不僅勞動(dòng)強(qiáng)度高�����,安全風(fēng)險(xiǎn)大����,而且檢測(cè)人員往往無(wú)法到達(dá)一些重要部位(如門式起重機(jī)主梁下部、象鼻梁和人字架頂部等)���,難以開展細(xì)致檢查�����,容易出現(xiàn)漏檢或誤檢����。
近年來(lái)����,由于無(wú)人機(jī)巡檢具有高效���、靈活和低成本的特點(diǎn)�����,己被廣泛應(yīng)用于電力設(shè)施與高壓輸電線巡檢�、風(fēng)力發(fā)電機(jī)葉片表面檢測(cè)、建筑物墻面檢測(cè)和植保檢測(cè)等領(lǐng)域�,并且取得了一些效果,逐漸成為一種不可替代的檢測(cè)手段���。然而特種設(shè)備的無(wú)人機(jī)巡檢尚處于起步階段���,尤其對(duì)于大型機(jī)電類特種設(shè)備(起重機(jī)、大型游樂(lè)設(shè)施)的檢測(cè)應(yīng)用更是鮮見(jiàn)報(bào)道�。因此,攻克大型特種設(shè)備缺乏表面缺陷高效檢測(cè)和量化識(shí)別的難題����,具有較大的意義和價(jià)值。
部分大型特種設(shè)備的結(jié)構(gòu)十分復(fù)雜���,如起重機(jī)和大型游樂(lè)設(shè)施等�,其涉及到多種維度的檢測(cè)���。因?yàn)楸粰z物大多是立體的且不同表面的光照情況不同��,裂紋的形態(tài)差異很大�����;另外大型特種設(shè)備的種類很多����,所以裂紋的背景也不同。除此之外�,銹斑、水漬以及物體間本身的縫隙等偽裂紋缺陷也會(huì)擾亂檢測(cè)結(jié)果���。
為解決門式起重機(jī)的下蓋板和塔式起重機(jī)的臂架端部及塔帽頂端等空間位置受限部位的拍攝視角問(wèn)題���,中國(guó)礦業(yè)大學(xué)的研究人員研制了一種搭載雙云臺(tái)的無(wú)人機(jī)智能視覺(jué)檢測(cè)系統(tǒng),該系統(tǒng)可以快速���、全面��、高質(zhì)量地采集被檢測(cè)部位的圖像��。在此基礎(chǔ)上,提出了一種適應(yīng)罐區(qū)圍堰墻面以及高空建筑物墻面等具有簡(jiǎn)單表面特征的墻面缺陷檢測(cè)和識(shí)別算法��,以對(duì)簡(jiǎn)單背景下的表面裂紋缺陷進(jìn)行檢測(cè)與評(píng)價(jià),為具有復(fù)雜結(jié)構(gòu)和表面特征的大型特種設(shè)備表面缺陷檢測(cè)奠定基礎(chǔ)�����。
1�、檢測(cè)原理
1、搭載雙云臺(tái)無(wú)人機(jī)的設(shè)計(jì)
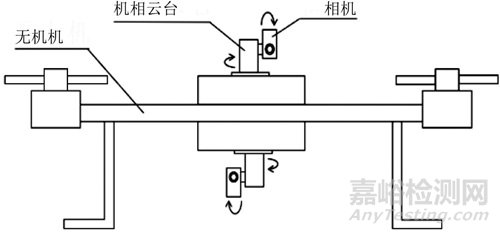
圖1 無(wú)人機(jī)雙云臺(tái)檢測(cè)系統(tǒng)結(jié)構(gòu)示意
為了更加方便地拍攝大型工業(yè)設(shè)備���、大型游樂(lè)設(shè)施及高危險(xiǎn)級(jí)別建筑上人員不易到達(dá)的關(guān)鍵受力部位�,在無(wú)人機(jī)上方增加了一個(gè)額外的云臺(tái)構(gòu)成雙云臺(tái)系統(tǒng)��,不僅能使云臺(tái)在水平方向的檢測(cè)范圍達(dá)到±155°�,更能在豎直方向上接近無(wú)死角檢測(cè)。
首先通過(guò)圖1所示的檢測(cè)裝置拍攝被測(cè)物體表面的圖像�����,然后利用Faster R-CNN神經(jīng)網(wǎng)絡(luò)對(duì)拍攝的圖像進(jìn)行缺陷的定性檢測(cè)����,然后對(duì)缺陷區(qū)域進(jìn)行形態(tài)學(xué)檢測(cè),進(jìn)一步去除偽裂紋�。
系統(tǒng)搭載的相機(jī)分辨率為4800萬(wàn)像素,鏡頭焦距為25 mm,畸變率小于2%���,只要無(wú)人機(jī)距離檢測(cè)目標(biāo)5 m內(nèi)就可以得到清晰的缺陷圖像�����,可以滿足無(wú)人機(jī)在安全距離外檢測(cè)結(jié)構(gòu)表面裂紋的要求���。
2、Faster R-CNN深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)裂紋檢測(cè)算法
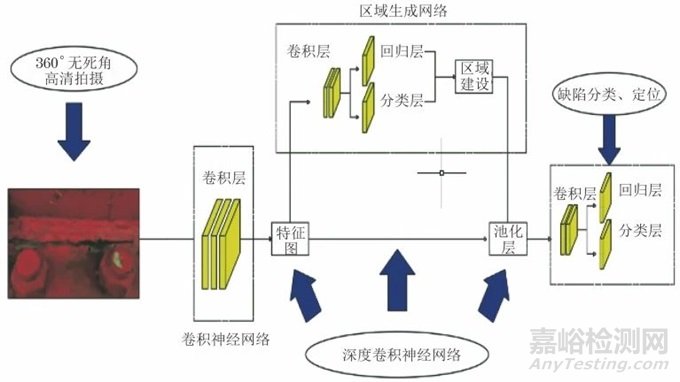
Faster R-CNN神經(jīng)網(wǎng)絡(luò)是由卷積神經(jīng)網(wǎng)絡(luò)���、區(qū)域生成網(wǎng)絡(luò)�����、池化層��、最終分類器4部分組成的�����,區(qū)域生成網(wǎng)絡(luò)和Faster R-CNN對(duì)象檢測(cè)網(wǎng)絡(luò)組合生成共享整個(gè)圖像的卷積特征和檢測(cè)網(wǎng)絡(luò)����,F(xiàn)aster R-CNN網(wǎng)絡(luò)用于檢測(cè)圖像,因?yàn)閰^(qū)域生成網(wǎng)絡(luò)的大部分檢測(cè)是在GPU(圖形處理器)中完成的�,所以檢測(cè)速度大大提高。
使用Faster R-CNN深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)對(duì)裂紋等缺陷進(jìn)行檢測(cè)的流程為:首先通過(guò)分類層和回歸層實(shí)現(xiàn)缺陷的分類和檢測(cè)�����,并于區(qū)域生成網(wǎng)絡(luò)中對(duì)第一組分類和回歸進(jìn)行分類��,以檢測(cè)區(qū)域生成網(wǎng)絡(luò)是否存在裂紋��;然后在池化層的預(yù)測(cè)網(wǎng)絡(luò)中對(duì)第二組進(jìn)行分類和回歸�����,其中回歸確定了圖像中候選區(qū)域的精確位置��。
圖2 基于Faster R-CNN神經(jīng)網(wǎng)絡(luò)的裂紋缺陷檢測(cè)算法步驟
3���、裂紋參數(shù)識(shí)別算法
檢測(cè)出缺陷后,還要測(cè)量出裂紋的面積���、長(zhǎng)度��,得到裂紋的寬度以及長(zhǎng)寬比�,利用這些參數(shù)進(jìn)行偽裂紋的剔除,以提供準(zhǔn)確有效的數(shù)據(jù)庫(kù)�,評(píng)估設(shè)備結(jié)構(gòu)的安全性。
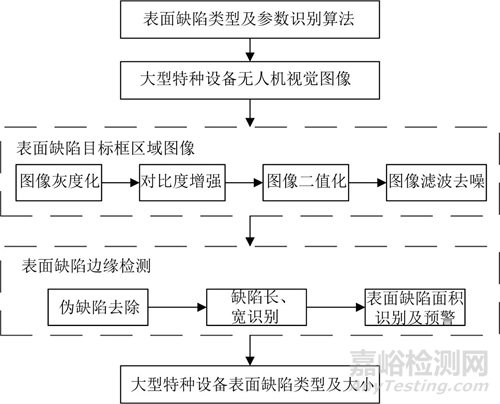
裂紋參數(shù)識(shí)別與評(píng)價(jià)算法流程圖如圖3所示�����,首先需進(jìn)行圖像預(yù)處理(即圖像的灰度化處理���、利用濾波消除噪點(diǎn)���、增加圖像的對(duì)比度以及圖像的二值化處理等步驟)進(jìn)行裂紋邊緣檢測(cè)(Canny算子、Sobel算子等)��、裂紋參數(shù)的計(jì)算����,最后進(jìn)行偽裂紋的去除。
圖3 裂紋參數(shù)識(shí)別與評(píng)價(jià)算法流程圖
檢測(cè)具體流程如下:
① 首先利用Faster R-CNN深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)對(duì)被檢測(cè)圖像進(jìn)行裂紋的定性檢測(cè)�����,然后將檢測(cè)出有裂紋的部分提取出來(lái)�,并對(duì)該區(qū)域進(jìn)行灰度化處理;
② 利用中值濾波進(jìn)行降噪處理����,然后利用線性灰度拉升對(duì)灰度圖像進(jìn)行對(duì)比度增強(qiáng)處理更好����;
③ 在二值化分割過(guò)程中采用最大熵閾值法確定圖像分割閾值���,增加裂紋和背景的差異程度;
④ 使用Canny算子提取裂縫邊緣�,然后將裂紋圖像進(jìn)行填充處理并統(tǒng)計(jì)填充的像素?cái)?shù)目Npixels1。因?yàn)榱鸭y的方向各異��,所以為了計(jì)算裂紋的最大和最小寬度����,需要將裂紋在行方向和列方向進(jìn)行投影;
⑤ 利用腐蝕����、膨脹等基本操作對(duì)圖像進(jìn)行細(xì)化,并去除圖像中的短支噪聲��,統(tǒng)計(jì)骨架化的裂紋像素?cái)?shù)Npixels2�;
⑥ 根據(jù)無(wú)人機(jī)拍攝時(shí)距物體的實(shí)際距離,然后根據(jù)相關(guān)公式計(jì)算單個(gè)像元的實(shí)際大小����,最后計(jì)算裂紋的面積�����、長(zhǎng)度��、寬度等參數(shù)�����。
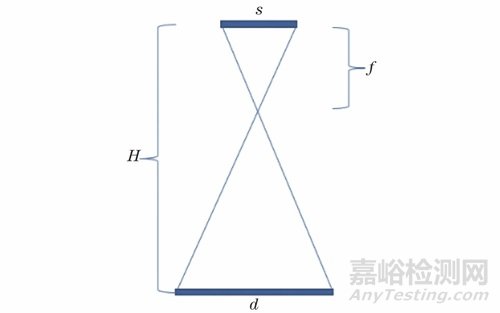
單個(gè)像元實(shí)際大小的計(jì)算原理如圖4所示�。圖4中s為單個(gè)像元的大小�,f為相機(jī)焦距,H近似為無(wú)人機(jī)距拍攝物體的實(shí)際距離����,則d為單個(gè)像元對(duì)應(yīng)的實(shí)際大小,計(jì)算公式:d=(s×H)/f����。
圖4 單個(gè)像元實(shí)際大小的計(jì)算原理示意
將單個(gè)像元形狀視為正方形,即可根據(jù)公式L=d×Npixels2得到裂紋的實(shí)際長(zhǎng)度L���,根據(jù)公式S=d×d×Npixels1得到裂紋真實(shí)面積S���,最后根據(jù)公式式D=S/L計(jì)算裂紋平均寬度D�。
由于大型特種設(shè)備種類多且雜��,且具有復(fù)雜的表面背景以及其他干擾因素����,F(xiàn)aster R-CNN深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)檢測(cè)出的缺陷很有可能包括銹斑、水漬以及物體間隙等偽裂紋缺陷��,所以需要對(duì)檢測(cè)出裂紋的區(qū)域做進(jìn)一步確認(rèn)�����。
考慮到真實(shí)裂紋大多數(shù)情況下具有較大的長(zhǎng)寬比���,而偽裂紋則相反,通常是一些小圓點(diǎn)或小塊�。因此,當(dāng)檢測(cè)出的裂紋具有大的長(zhǎng)寬比以及面積較小時(shí)���,就可以認(rèn)為其是真裂紋��,反之則為偽裂紋�。
4、基于無(wú)人機(jī)視覺(jué)的結(jié)構(gòu)表面裂紋檢測(cè)流程
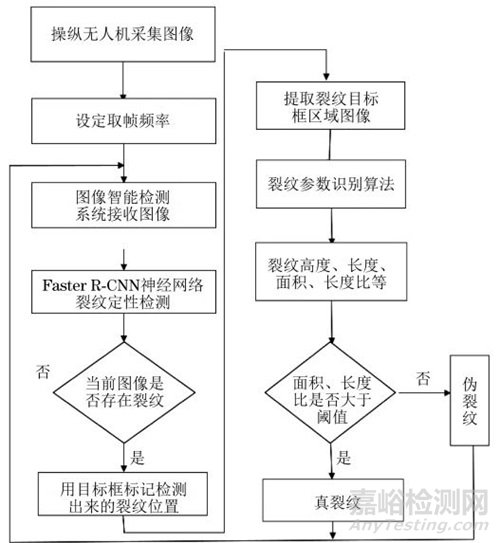
編寫MATLAB程序�����,調(diào)用裂紋缺陷檢測(cè)與識(shí)別算法��,批量完成缺陷的自動(dòng)檢測(cè)��。首先利用無(wú)人機(jī)去集圖像�����,然后利用Faster R-CNN網(wǎng)絡(luò)對(duì)采集到的圖像進(jìn)行檢測(cè)����,檢測(cè)到有裂紋則用裂紋的最小外接矩形框圈出,再將圈出的區(qū)域提取出來(lái)��;最后�,調(diào)用上述算法去除偽裂紋,其檢測(cè)流程如圖5所示���。
圖5 基于無(wú)人機(jī)視覺(jué)的大型特種設(shè)備表面裂紋缺陷檢測(cè)流程圖
2���、裂紋的定性檢測(cè)試驗(yàn)
試驗(yàn)中采用的深度學(xué)習(xí)框架為TensorFlow���,同時(shí)為了加快訓(xùn)練的進(jìn)度還可以使用GPU對(duì)其進(jìn)行訓(xùn)練。最終的檢測(cè)效果由檢測(cè)的準(zhǔn)確率和速度所決定�����。
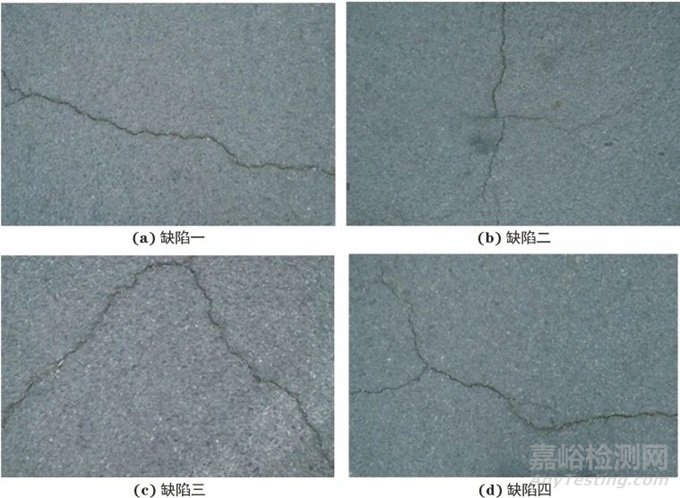
訓(xùn)練樣本為200張地面裂紋圖片�、60張墻壁裂紋圖片以及40張建筑物表面裂紋圖片。部分裂紋缺陷訓(xùn)練數(shù)據(jù)集圖像如圖6所示��。
圖6 部分裂紋缺陷訓(xùn)練數(shù)據(jù)集圖像
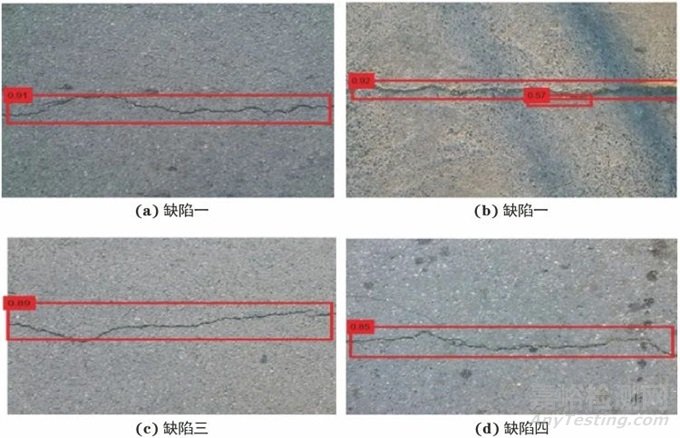
部分測(cè)試圖像的裂紋檢測(cè)效果如圖7所示��,紅色框的左上角里面的數(shù)字表示該區(qū)域?yàn)榱鸭y的概率���。
圖7 部分測(cè)試圖像的裂紋檢測(cè)效果
從圖7中不難看出,該神經(jīng)網(wǎng)絡(luò)對(duì)圖像中裂紋的檢測(cè)有較高的準(zhǔn)確率����,并且對(duì)裂紋的定位也較準(zhǔn)確���。經(jīng)過(guò)對(duì)測(cè)試結(jié)果的統(tǒng)計(jì)����,該系統(tǒng)裂紋檢測(cè)的準(zhǔn)確率高達(dá)95.74%�����。接下來(lái)�����,通過(guò)進(jìn)一步的計(jì)算實(shí)現(xiàn)對(duì)裂紋幾何尺寸的測(cè)算����。
3、裂紋的量化識(shí)別試驗(yàn)
首先通過(guò)無(wú)人機(jī)的拍攝系統(tǒng)獲取裂紋的原始圖像����,之后使用最小矩形框選的方法把圖像中的裂紋框選出來(lái),最后測(cè)量出無(wú)人機(jī)與裂紋的距離���。不同裂紋的真實(shí)幾何尺寸如表1所示���。
表1 不同裂紋的真實(shí)幾何尺寸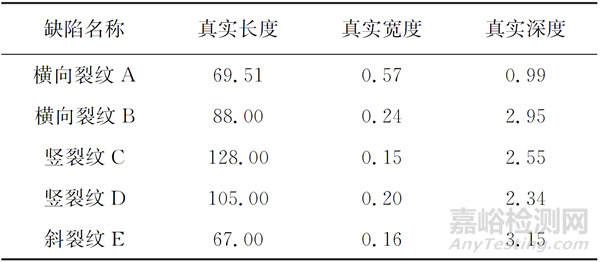
首先裂紋的位置由經(jīng)過(guò)大量訓(xùn)練的Faster R-CNN深度神經(jīng)網(wǎng)絡(luò)算法找出,為了減小計(jì)算量���,直接對(duì)檢測(cè)出來(lái)的目標(biāo)區(qū)域進(jìn)行處理�。然后調(diào)用上述的裂紋參數(shù)識(shí)別算法,定量測(cè)出裂紋的長(zhǎng)度和寬度����,并與裂紋的真實(shí)尺寸進(jìn)行比較,驗(yàn)證算法的精確性�。
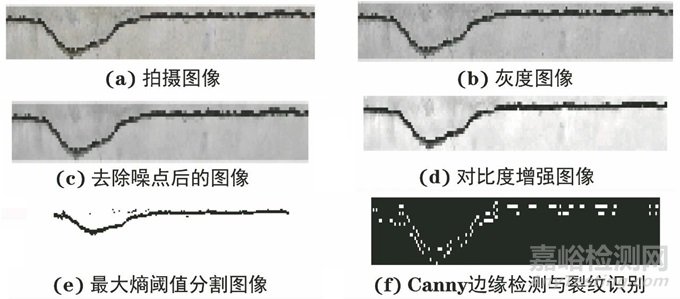
以樣本庫(kù)中驗(yàn)證集中已知裂紋實(shí)際尺寸的裂紋圖像為例,利用形態(tài)學(xué)處理裂紋圖像�����,各識(shí)別步驟對(duì)裂紋的處理結(jié)果如圖8所示���。
圖8 各識(shí)別步驟對(duì)裂紋的處理結(jié)果
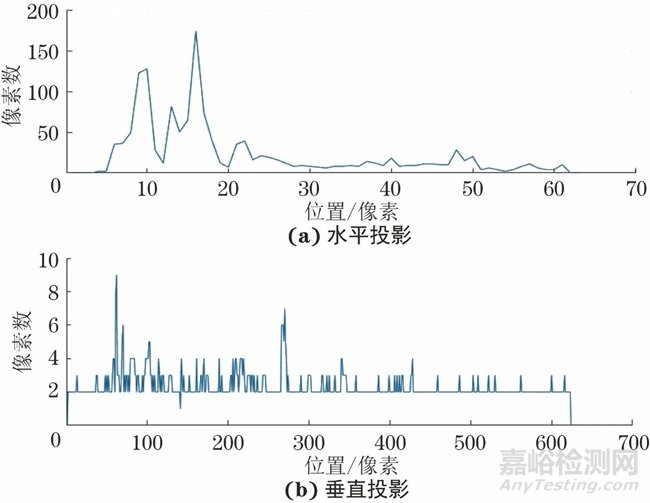
然后對(duì)裂紋進(jìn)行行(水平)投影和列(垂直)投影���,得到的裂紋投影曲線如圖9所示,其中橫坐標(biāo)表示圖像的不同位置���,縱坐標(biāo)表示對(duì)應(yīng)位置的像素?cái)?shù)目�。
圖9 裂紋區(qū)域水平��、垂直方向投影曲線
從圖9中可以看出�����,裂紋最大寬度為9像素���。提取裂紋寬度為1個(gè)像素的骨架�,得到裂紋在長(zhǎng)度方向有661個(gè)像素����,最后計(jì)算得到裂紋的平均寬度為5.32像素,長(zhǎng)寬比為124.2����。每個(gè)像素實(shí)際距離為0.101 mm,計(jì)算出裂紋的實(shí)際尺寸并和表1的數(shù)據(jù)做對(duì)比��,橫向裂紋A的檢測(cè)寬度為0.54 mm����,檢測(cè)長(zhǎng)度為66.76 mm;而實(shí)際寬度為0.57 mm����,實(shí)際長(zhǎng)度為69.51 mm;寬度測(cè)量誤差為3.9%�����,長(zhǎng)度測(cè)量誤差為5.3%。
從實(shí)際結(jié)果來(lái)看����,裂紋的測(cè)量長(zhǎng)度和寬度的誤差值在允許范圍之內(nèi),所以根據(jù)此算法識(shí)別出的裂紋的幾何數(shù)據(jù)可以滿足實(shí)際應(yīng)用�。
在試驗(yàn)過(guò)程中研究人員也注意到了一些引起誤差的因素,如無(wú)人機(jī)拍攝圖像的質(zhì)量會(huì)受風(fēng)速�、拍攝角度、振動(dòng)����、成像設(shè)備的噪聲以及光線的影響。
在采集圖像的過(guò)程中要盡量選擇風(fēng)速小的天氣����,選擇抗風(fēng)等級(jí)高的無(wú)人機(jī),也可以加強(qiáng)攝像裝置的光學(xué)防抖能力���,或者增加無(wú)人機(jī)防抖的結(jié)構(gòu)���,盡量在正對(duì)裂紋的方向上進(jìn)行拍攝,否則會(huì)使測(cè)量距離與實(shí)際距離之間的誤差變大�����。
在此基礎(chǔ)上采用正確且合適的圖像預(yù)處理技術(shù)也可以大幅提高圖像質(zhì)量��;同時(shí)���,在保證安全的情況下應(yīng)盡可能讓無(wú)人機(jī)靠近要采集的表面結(jié)構(gòu)�,以獲取更小的像素當(dāng)量����,提高圖像的質(zhì)量。
4����、結(jié)語(yǔ)
介紹了一種用于大型特種設(shè)備表面裂紋缺陷檢測(cè)的無(wú)人機(jī)雙云臺(tái)檢測(cè)裝置。該裝置可對(duì)大型特種設(shè)備的各個(gè)部位進(jìn)行全方位拍攝��,提出了利用Faster R-CNN深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)檢測(cè)裂紋的算法����,利用裂紋特征參數(shù)進(jìn)行墻體裂紋的非接觸式精確測(cè)量,實(shí)現(xiàn)了裂紋缺陷的高精度可視化檢測(cè)?����,F(xiàn)場(chǎng)檢測(cè)結(jié)果表明�����,該算法能夠適應(yīng)簡(jiǎn)單背景下罐區(qū)圍堰墻面以及高空建筑物墻面的高精度檢測(cè)要求,提高了無(wú)人機(jī)載視覺(jué)系統(tǒng)的缺陷識(shí)別能力�����。
作者:馬金鑫1���,杜偉鑫2�,袁昊2�����,趙逸飛1���,楊學(xué)才1
工作單位:1.中國(guó)礦業(yè)大學(xué) 化工學(xué)院
2.中國(guó)礦業(yè)大學(xué) 安全工程學(xué)院
第一作者簡(jiǎn)介:馬金鑫�����,主要研究方向?yàn)樘胤N設(shè)備無(wú)損檢測(cè)技術(shù)��。
來(lái)源:《無(wú)損檢測(cè)》2023年12期