針對(duì)電梯制動(dòng)器作為高可靠性設(shè)備����,其衰退周期長(zhǎng)�,在真實(shí)工作環(huán)境中全生命周期下的大量標(biāo)注數(shù)據(jù)不易被采集的問(wèn)題,基于映射的無(wú)監(jiān)督深度遷移學(xué)習(xí)(UDTL)法�����,利用仿真制動(dòng)器的訓(xùn)練網(wǎng)絡(luò)判定實(shí)際制動(dòng)器的健康狀態(tài)�,從而對(duì)真實(shí)工作環(huán)境中電梯制動(dòng)器的剩余壽命進(jìn)行精準(zhǔn)預(yù)測(cè)。方法概括如下:
該方法借助長(zhǎng)短期記憶網(wǎng)絡(luò)自編碼器(LSTM-ED)實(shí)現(xiàn)對(duì)原始數(shù)據(jù)的特征提取�����。其根據(jù)健康數(shù)據(jù)訓(xùn)練模型,將網(wǎng)絡(luò)重構(gòu)序列與原始序列的差方序列作為特征序列�,因此特征領(lǐng)域?qū)嶋H是傳感器數(shù)據(jù)在時(shí)間序列上異常值的數(shù)據(jù)表征,從而保證了不同設(shè)備在特征領(lǐng)域中均具有一定的相似性���;結(jié)合最大平均差異實(shí)現(xiàn)仿真數(shù)據(jù)與實(shí)際制動(dòng)器數(shù)據(jù)在特征領(lǐng)域的再次對(duì)齊���,從而保證兩者在特征序列上的一致性���,提高預(yù)測(cè)精度���。同時(shí)���,用分步訓(xùn)練法代替?zhèn)鹘y(tǒng)的聯(lián)合訓(xùn)練法��。在預(yù)測(cè)過(guò)程中,提出在線微調(diào)的方法�����,利用得到的新數(shù)據(jù)逐步更新特征提取器����,從而實(shí)現(xiàn)對(duì)新設(shè)備的高精度壽命預(yù)測(cè)�����。
1. 源領(lǐng)域和目標(biāo)領(lǐng)域
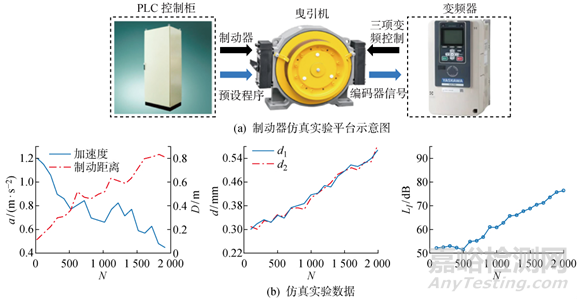
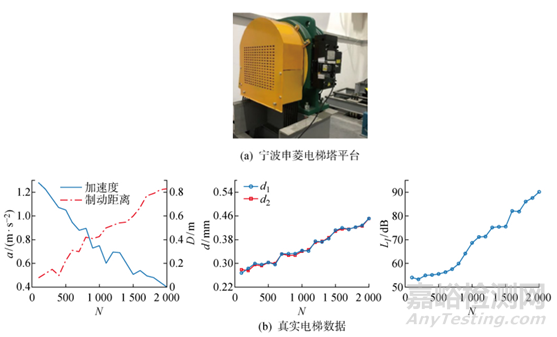
仿真試驗(yàn)平臺(tái)由迅達(dá)曳引機(jī)�����、PLC控制柜和變頻器組成,如圖1(a)所示���。其中�,a為加速度�,D為制動(dòng)距離,d為間隙�����,LI為聲強(qiáng)級(jí)�,N為運(yùn)行次數(shù)�����。變頻器和制動(dòng)器(110V直流電壓)聯(lián)動(dòng)能夠加速制動(dòng)器的制動(dòng)失效��,從而仿真制動(dòng)器制動(dòng)力不足的失效模式��?����;谏鲜龇椒ǎ杉玫街苿?dòng)器從初始狀態(tài)運(yùn)行至失效的全生命周期數(shù)據(jù)(見(jiàn)圖1(b))��,并將其作為源領(lǐng)域數(shù)據(jù)�。當(dāng)制動(dòng)器在寧波申菱電梯塔(見(jiàn)圖2(a))運(yùn)作時(shí)��,人工定期檢查得到制動(dòng)器從初始狀態(tài)運(yùn)行至失效的全生命周期數(shù)據(jù)(見(jiàn)圖2(b))����,并將其作為目標(biāo)領(lǐng)域數(shù)據(jù)。利用源領(lǐng)域數(shù)據(jù)訓(xùn)練模型��,并基于特征映射的遷移學(xué)習(xí)法實(shí)現(xiàn)對(duì)目標(biāo)領(lǐng)域的剩余壽命精確預(yù)測(cè)����。
圖1 制動(dòng)器仿真實(shí)驗(yàn)
圖2 寧波申菱電梯塔實(shí)驗(yàn)
2. 無(wú)監(jiān)督的深度遷移學(xué)習(xí)算法
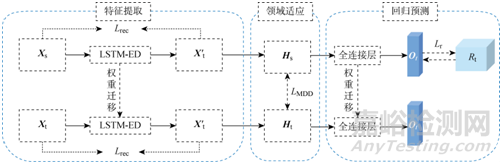
無(wú)監(jiān)督的深度遷移學(xué)習(xí)算法的整體框圖如圖3所示�,算法的損失函數(shù)為:
式中��,Lrec為重構(gòu)模型的損失,LMMD為源領(lǐng)域的特征序列與目標(biāo)領(lǐng)域的特征序列的遷移損失����,Lr為回歸的損失�;a、b和g為3個(gè)損失的修正系數(shù)���。
圖3 無(wú)監(jiān)督的深度遷移學(xué)習(xí)算法框圖
典型的遷移學(xué)習(xí)多采用將目標(biāo)領(lǐng)域和源領(lǐng)域的數(shù)據(jù)整合在一起訓(xùn)練�,即將a��、b和g均設(shè)為非零值進(jìn)行聯(lián)合訓(xùn)練����。該訓(xùn)練模式未考慮各損失函數(shù)的實(shí)際意義,易導(dǎo)致對(duì)源領(lǐng)域數(shù)據(jù)的過(guò)擬合���,而對(duì)目標(biāo)領(lǐng)域數(shù)據(jù)的預(yù)測(cè)結(jié)果不理想��。此外�,該方法需要完整的目標(biāo)領(lǐng)域數(shù)據(jù),因此在實(shí)際運(yùn)用中無(wú)法對(duì)目標(biāo)領(lǐng)域設(shè)備進(jìn)行在線預(yù)測(cè)��。對(duì)此���,提出一種分步訓(xùn)練方法,其通過(guò)保證各模塊的準(zhǔn)確性實(shí)現(xiàn)RUL精準(zhǔn)預(yù)測(cè)���,具體步驟如下:
(1)令b=g =0�,將源領(lǐng)域中前10%的數(shù)據(jù)作為健康狀態(tài)數(shù)據(jù)輸入�����,從而更新LSTM-ED網(wǎng)絡(luò)的權(quán)重和偏置����。根據(jù)訓(xùn)練得到的重構(gòu)網(wǎng)絡(luò)�����,將輸入序列轉(zhuǎn)化為與輸入等長(zhǎng)的特征序列,并將這一過(guò)程定義為特征提取�����。
(2)在進(jìn)行回歸預(yù)測(cè)訓(xùn)練時(shí)��,令a=b=0���,即將源領(lǐng)域數(shù)據(jù)的回歸誤差作為更新權(quán)重的損失函數(shù)��,同時(shí)固定LSTM-ED的權(quán)重不變��,僅更新全連接層的權(quán)重和偏置。
(3)權(quán)重遷移利用源領(lǐng)域?qū)W習(xí)得到的LSTM-ED網(wǎng)絡(luò)和全連接網(wǎng)絡(luò)��,初始化目標(biāo)領(lǐng)域網(wǎng)絡(luò)。通過(guò)特征提取模塊�����,將新得到的目標(biāo)領(lǐng)域序列轉(zhuǎn)化為Ht�����,并將Ht與源領(lǐng)域特征序列Hs進(jìn)行領(lǐng)域適應(yīng)�����,即令a=g =0,利用損失函數(shù)更新LSTM-ED����,從而減小Ht與Hs的分布誤差�。
(4)LSTM-ED網(wǎng)絡(luò)能夠針對(duì)目標(biāo)領(lǐng)域數(shù)據(jù)進(jìn)行傳感器異常監(jiān)測(cè),因此利用由步驟3)更新后的LSTM-ED參數(shù)得到新特征序列�,并將其輸入到全連接網(wǎng)絡(luò)中得到當(dāng)前預(yù)測(cè)的剩余壽命���。該算法預(yù)測(cè)的剩余壽命值均小于1�,其含義為剩余生命周期占總生命周期的比例。若預(yù)測(cè)值小于90%�����,則直接將其作為該點(diǎn)的RUL值;若預(yù)測(cè)值大于90%�,則說(shuō)明該時(shí)間段內(nèi)的數(shù)據(jù)為電梯制動(dòng)器前10%的健康生命周期數(shù)據(jù),需要根據(jù)LSTM-ED的異常值檢測(cè)特性����,令b=g =0����、a=1�,再次訓(xùn)練更新LSTM-ED參數(shù),并利用新LSTM-ED得到新特征序列���,將其作為全連接網(wǎng)絡(luò)的輸入值���,重新預(yù)測(cè)該點(diǎn)的剩余壽命。
其中�����,步驟(1)和(2)為利用源領(lǐng)域數(shù)據(jù)進(jìn)行訓(xùn)練網(wǎng)絡(luò)�����,完成之后即可得到針對(duì)源領(lǐng)域數(shù)據(jù)的高精度剩余壽命預(yù)測(cè)算法�。步驟(3)和(4)為借助目標(biāo)領(lǐng)域數(shù)據(jù)進(jìn)行在線微調(diào)訓(xùn)練并得到預(yù)測(cè)結(jié)果����。
3. 電梯制動(dòng)器剩余壽命預(yù)測(cè)性能
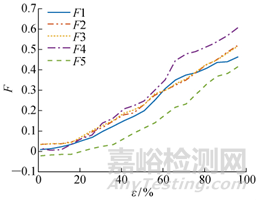
利用傳感器網(wǎng)絡(luò)連續(xù)采集制動(dòng)器間隙、編碼器讀數(shù)�、摩擦噪聲和制動(dòng)加速度等相關(guān)物理參數(shù)���,并將數(shù)據(jù)預(yù)處理后作為L(zhǎng)STM-ED網(wǎng)絡(luò)輸入。截取仿真數(shù)據(jù)中前10%的數(shù)據(jù)作為健康數(shù)據(jù)��,對(duì)LSTM-ED進(jìn)行訓(xùn)練�����,并利用訓(xùn)練好的網(wǎng)絡(luò)將傳感器數(shù)據(jù)投射到如圖4所示的特征區(qū)域中�,其中F為經(jīng)學(xué)習(xí)得到的特征值,e為運(yùn)行進(jìn)度(運(yùn)行時(shí)間占總壽命的比例)���??芍?�,5個(gè)特征值(F1~ F5)隨時(shí)間的增加而增大��,且增大趨勢(shì)相似��,表明LSTM-ED可以作為特征提取器并有效地反映制動(dòng)器衰退現(xiàn)象���。
圖4 仿真實(shí)驗(yàn)數(shù)據(jù)提取得到的特征
利用全連接網(wǎng)絡(luò)對(duì)LSTM-ED提取的特征進(jìn)行回歸預(yù)測(cè)���,并利用仿真數(shù)據(jù)中的真實(shí)壽命訓(xùn)練全連接網(wǎng)絡(luò)����。經(jīng)訓(xùn)練后���,仿真數(shù)據(jù)的損失函數(shù)降低至小于0.015��,即得到針對(duì)源領(lǐng)域數(shù)據(jù)的高精度剩余壽命預(yù)測(cè)算法�����。
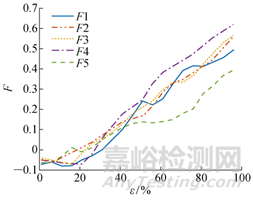
利用在線微調(diào)方法即步驟(3)和步驟(4)���,進(jìn)一步訓(xùn)練LSTM-ED的特征提取器參數(shù),并基于新的特征提取器將電梯塔中的數(shù)據(jù)轉(zhuǎn)化為如圖5所示的特征數(shù)據(jù)���。可知�,該提取器同樣可以作為特征提取器并有效地反映制動(dòng)器衰退現(xiàn)象。
圖5 電梯塔數(shù)據(jù)通過(guò)UDTL學(xué)習(xí)得到的特征
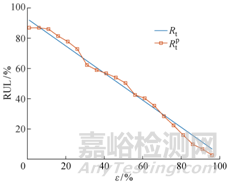
在預(yù)測(cè)過(guò)程中�����,利用全連接層預(yù)測(cè)回歸得到的特征��,預(yù)測(cè)結(jié)果如圖6所示?��?梢?jiàn)��,剩余壽命的預(yù)測(cè)曲線與真實(shí)曲線的吻合度較高��。為量化UDTL的預(yù)測(cè)結(jié)果�,引入平均絕對(duì)值誤差(MAE)�����、均方誤差(MSE)和均方根誤差(RMSE)����,經(jīng)計(jì)算MAE=0.03、MSE=0.0016�����、RMSE=0.04�。可知�,利用UDTL預(yù)測(cè)的誤差均很小,表明UDTL可以有效預(yù)測(cè)真實(shí)工況下的電梯制動(dòng)器剩余生命周期�。
圖6 UDTL對(duì)電梯塔的剩余生命周期預(yù)測(cè)
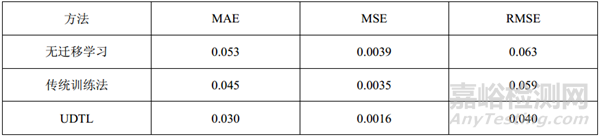
同時(shí)為驗(yàn)證UDTL的有效性��,將未進(jìn)行遷移學(xué)習(xí)的預(yù)測(cè)算法和傳統(tǒng)訓(xùn)練法作為對(duì)比�,進(jìn)行電梯塔數(shù)據(jù)的剩余壽命預(yù)測(cè)�,并計(jì)算不同方法下電梯塔的剩余壽命預(yù)測(cè)誤差,結(jié)果如表1所示���??芍?����,在MSE方面�,UDTL方法較無(wú)遷移學(xué)習(xí)的情況降低了59%,較傳統(tǒng)訓(xùn)練法降低了54%����,證明該方法能夠有效提高電梯制動(dòng)器壽命預(yù)測(cè)的準(zhǔn)確度。
表1 不同方法下電梯塔的剩余生命周期預(yù)測(cè)誤差