導(dǎo) 語
近日,同濟大學(xué)可穿戴機器人實驗室開展了一項研究���,探討了如何通過整合環(huán)境����、生理和物理信息,結(jié)合人在環(huán)中控制���、神經(jīng)肌肉接口���、柔性電子和生機電芯片等技術(shù)����,來構(gòu)建下一代高性能可穿戴機器人,以改善人體運動和感官的重建與增強����。相關(guān)研究成果已發(fā)表在《Nature Communications》,第一作者夏海生為同濟大學(xué)機械與能源工程學(xué)院副教授�,通訊作者李智軍為同濟大學(xué)特聘教授、機械與能源工程學(xué)院院長���。
1����、研究背景
可穿戴機器人,如外骨骼和假肢�,雖然能夠輔助或代替人完成一定的操作,但穿戴者往往難以將其視為身體的一部分����。這表明需要增強可穿戴機器人的“具身性”,即用戶對穿戴機器人的擁有感和本體感���。目前���,穿戴機器人在與人融合方面面臨諸多困難,如人機交互程度低�、雙向神經(jīng)肌肉接口缺乏,這些問題常常導(dǎo)致用戶最終放棄使用穿戴機器人�。
2、研究概述
基于功能化導(dǎo)電聚合物的設(shè)計����,研究團隊設(shè)計了功能化聚苯胺基時序黏附水凝膠貼片。它可以實現(xiàn)心臟的同步機械生理監(jiān)測和電耦合治療�,并牢固附著在心臟表面監(jiān)測心臟的機械運動和電活動。
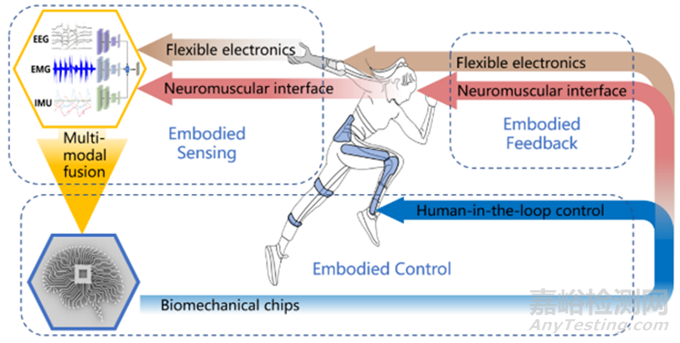
為了應(yīng)對現(xiàn)有的可穿戴機器人在與人融合方面的挑戰(zhàn)���,文章提出了整合一系列先進技術(shù)�,包括多模態(tài)融合、人在環(huán)中控制���、神經(jīng)肌肉接口����、柔性電子和生機電芯片����,有望顯著改善可穿戴機器人與人的交互程度,提高具身性���。
圖 1 高性能可穿戴機器人的突破性技術(shù)
(圖片來自原文)
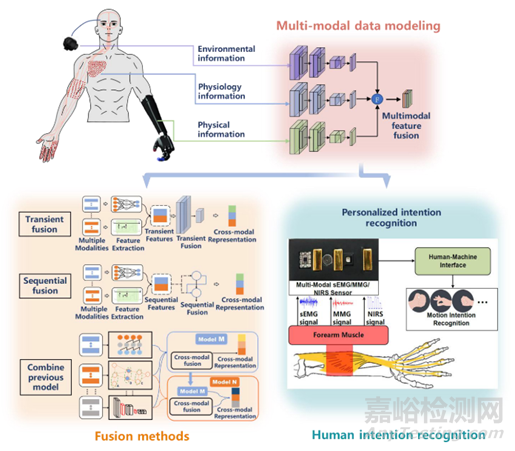
在運動增強方面����,文章強調(diào)了多模態(tài)融合的重要性���,即通過整合來自不同傳感器的信息,如生理信息���、運動信息�、視覺信息等����,使可穿戴機器人能夠更精確地感知環(huán)境和識別人的意圖�。從而實現(xiàn)機器人更自然的與環(huán)境����、與人交互。
圖2 穿戴機器人的多模態(tài)信息融合
(圖片來自原文)
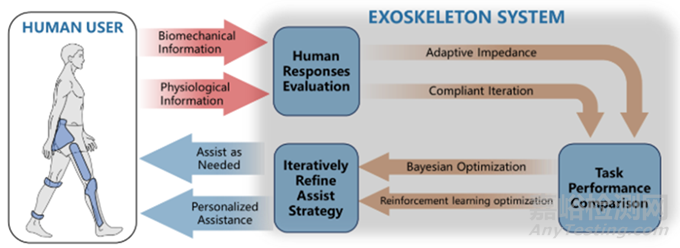
文章提出人在環(huán)中控制將人類用戶納入機器人的控制回路中�,通過考慮用戶的生理和心理反應(yīng)(如肌肉活動、代謝成本���、步態(tài)對稱性等)來優(yōu)化機器人的控制參數(shù)����。這種迭代更新的過程旨在最小化或最大化用戶的反應(yīng)���,以提高人機交互的效率和舒適性�。
圖3 穿戴機器人的人在環(huán)中控制
(圖片來自原文)
在感覺重建方面����,文章提出雙向神經(jīng)肌肉接口,包括感知人類運動意圖和向人提供感覺反饋�。這種接口通過直接探測神經(jīng)或肌肉信號來感知用戶的意圖,并通過刺激神經(jīng)通路向用戶傳遞關(guān)于外部環(huán)境或人機狀態(tài)的信息���。
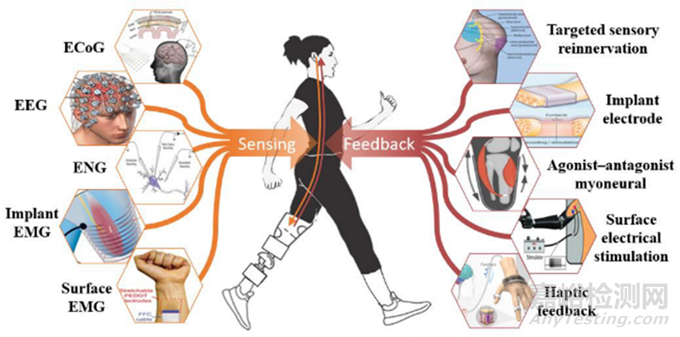
圖4 穿戴機器人的雙向神經(jīng)肌肉接口
(圖片來自原文)
柔性電子技術(shù)的發(fā)展為可穿戴機器人提供了與人體皮膚或內(nèi)部器官相貼合適應(yīng)的傳感器和反饋器���,從而提高信號采集的準(zhǔn)確性和感覺反饋的質(zhì)量����。這種技術(shù)有助于解決運動過程中皮膚或內(nèi)部器官變形導(dǎo)致的器件接觸不良問題����。
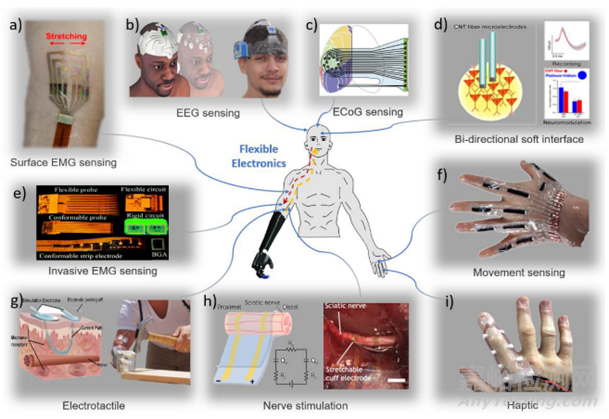
圖 5穿戴機器人用于傳感和反饋的柔性電子器件
(圖片來自原文)
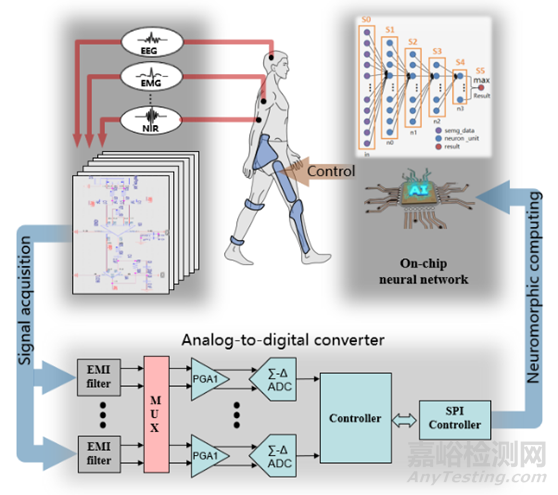
生機電芯片專門設(shè)計用于可穿戴機器人中生機電信息的采集、傳輸和處理����。這些芯片作為中央處理單元,能夠處理來自多模態(tài)傳感器的信號����,并支持大規(guī)模深度學(xué)習(xí)網(wǎng)絡(luò)算法,為可穿戴機器人提供快速的信號處理能力���。
圖 6 穿戴機器人的生機電芯片
(圖片來自原文)
3、研究意義
通過這些技術(shù)的應(yīng)用�,下一代可穿戴機器人將更好地滿足用戶需求,讓人感覺機器人成為人身體的一部分����,并為運動和感覺功能障礙的患者提供幫助���,成為有效的輔助和康復(fù)工具。
參考文獻:
Haisheng Xia, Yuchong Zhang, Nona Rajabi, Farzaneh Taleb, Qunting Yang, Danica Kragic & Zhijun Li. Shaping high-performance wearable robots for human motor and sensory reconstruction and enhancement. Nat Commun 15, 1760 (2024). https://doi.org/10.1038/s41467-024-46249-0