導(dǎo) 語
近日,中國科學(xué)院自動化研究所侯增廣醫(yī)療機器人團隊李國濤等提出了一種膝關(guān)節(jié)外骨骼空間自對齊機制,實現(xiàn)了膝關(guān)節(jié)屈伸伸展和髖關(guān)節(jié)內(nèi)旋外旋的同時運動輔助����。針對人體與機器人關(guān)節(jié)軸線的不對齊問題,建立了膝關(guān)節(jié)外骨骼的運動學(xué)模型����,證明了該外骨骼的運動相容性����。提出了基于全局力矩操作度指數(shù)的膝關(guān)節(jié)外骨骼優(yōu)化方法�����,提高了力矩傳遞能力。相關(guān)研究成果已發(fā)表在《IEEE Transactions On Neural Systems And Rehabilitation Engineering》中��。
1��、研究背景
傳統(tǒng)膝關(guān)節(jié)外骨骼設(shè)計��,通常將膝關(guān)節(jié)簡化為一個簡單的旋轉(zhuǎn)關(guān)節(jié)�����,并未考慮人機關(guān)節(jié)軸的錯位����,這會對用戶產(chǎn)生不良交互力�����,降低佩戴舒適度����。自對齊機構(gòu)是解決人機關(guān)節(jié)軸線錯位問題的重要途經(jīng),但目前的設(shè)計都基于平面自對齊機構(gòu)�����,其無法適應(yīng)三維空間中膝關(guān)節(jié)的瞬時旋轉(zhuǎn)中心�����,空間自對齊機構(gòu)設(shè)計方法仍不清晰�����。軟性外骨骼和剛?cè)峄旌贤夤趋酪部梢杂糜谔岣叽┐魇孢m度,但是它們往往難以獲得期望的載荷能力�����。因此����,本研究專注于研究基于空間自對齊機構(gòu)的剛性外骨骼機器人,以確保外骨骼既有足夠的載荷能力����,又具備良好的穿戴性能��。
2��、研究概述
基于功能化導(dǎo)電聚合物的設(shè)計����,研究團隊設(shè)計了功能化聚苯胺基時序黏附水凝膠貼片。它可以實現(xiàn)心臟的同步機械生理監(jiān)測和電耦合治療��,并牢固附著在心臟表面監(jiān)測心臟的機械運動和電活動����。
膝關(guān)節(jié)外骨骼可以同時輔助膝關(guān)節(jié)的屈曲伸展和髖部的內(nèi)旋外旋運動,也可以通過膝關(guān)節(jié)外骨骼完成二者的協(xié)同運動輔助。使用該膝外骨骼機器人有望拓展康復(fù)訓(xùn)練模式�����,增強下肢運動輔助的靈活性����,以提高外骨骼的康復(fù)效果�����。因此��,本研究設(shè)計了一款具有髖部內(nèi)旋外旋功能的便攜式膝關(guān)節(jié)外骨骼機器人�����。
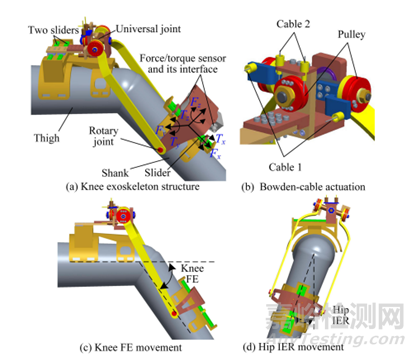
圖1 膝關(guān)節(jié)外骨骼的設(shè)計��。(a)和(b)為整體結(jié)構(gòu)和驅(qū)動單元����,(c)和(d)表示膝關(guān)節(jié)的屈曲伸展運動和髖部的內(nèi)旋外旋運動。
圖1給出了帶有力矩傳感器的膝關(guān)節(jié)外骨骼整體結(jié)構(gòu)圖����。其中膝關(guān)節(jié)外骨骼由一個萬向節(jié)����、一個旋轉(zhuǎn)關(guān)節(jié)�����、兩個滑動關(guān)節(jié)和一個力矩傳感器組成�����。為了增強結(jié)構(gòu)強度��,使用兩個滑塊構(gòu)建了大腿上的滑動關(guān)節(jié)�����,并使用一個較大的滑塊構(gòu)建了小腿上的滑動關(guān)節(jié)��。在膝關(guān)節(jié)外骨骼中��,使用纜繩1和相應(yīng)的兩個滑輪來驅(qū)動與膝關(guān)節(jié)屈曲伸展相對應(yīng)的萬向節(jié)的旋轉(zhuǎn)關(guān)節(jié)�����,而使用纜繩2和相應(yīng)的滑輪來驅(qū)動與髖關(guān)節(jié)內(nèi)旋外旋相對應(yīng)的另一個旋轉(zhuǎn)關(guān)節(jié)�����。
本研究通過實驗證明了所提出的外骨骼在膝關(guān)節(jié)屈曲伸展和髖關(guān)節(jié)內(nèi)旋外旋運動方面的性能�����。具體包括:運動學(xué)透明度驗證��、運動范圍測試����、相互作用力實驗和運動輔助實驗。
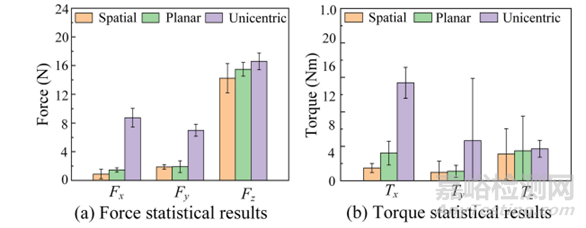
實驗結(jié)果如下:圖2給出了在輔助膝關(guān)節(jié)屈曲伸展運動期間的相互作用力和扭矩的實驗結(jié)果����。定義每個力/力矩的均值的絕對值為AM。定義三個力/力矩的AM平方和的算術(shù)平方根為力/力矩的SRAM�����。圖3給出了三個外骨骼的AM的結(jié)果�����。相對基于平面自對齊機構(gòu)的外骨骼機器人,所設(shè)計的膝關(guān)節(jié)外骨骼的Fx��,F(xiàn)y�����,F(xiàn)z��,Tx����,Ty和Tz的AM分別降低了38.8%��,2.0%�����,8.0%����,53.7%,11.5%和10.6%�����;相對傳統(tǒng)單軸外骨骼,降低了89.8%����、73.1%�����、14.1%��、87.0%��、79.1%和16.3%��。相對基于平面自對齊機構(gòu)的外骨骼��,所設(shè)計外骨骼機器人的力和力矩的SRAMs分別降低了8.1%和26.4%;相對傳統(tǒng)單軸外骨骼����,降低了28.1%和72.1%。
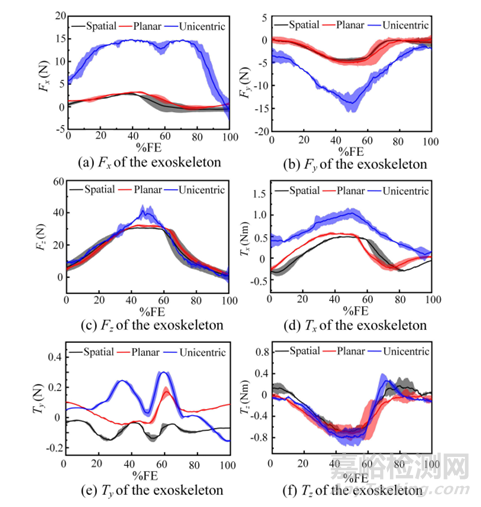
圖2 膝關(guān)節(jié)屈曲伸展輔助的相互作用力和力矩實驗結(jié)果����。%FE表示任務(wù)進度的百分比。
圖3 膝關(guān)節(jié)屈曲伸展運動輔助期間相互作用力和力矩的AM統(tǒng)計結(jié)果��。
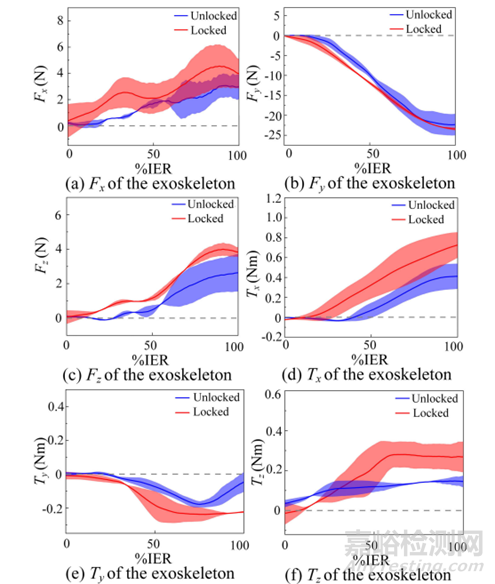
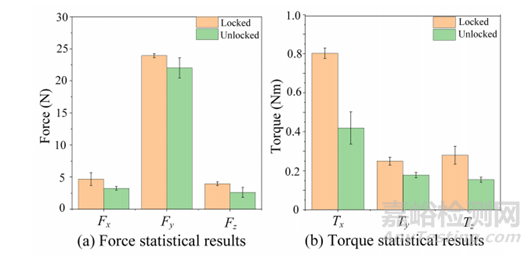
圖4展示了髖關(guān)節(jié)內(nèi)旋外旋運動輔助的實驗結(jié)果����,圖5呈現(xiàn)了滑塊解鎖和滑塊鎖定狀態(tài)下的AM結(jié)果�����。在滑塊解鎖狀態(tài)下����,開發(fā)的外骨骼的Fx,F(xiàn)y��,F(xiàn)z����,Tx�����,Ty和Tz的AM分別比鎖定狀態(tài)下低了30.5%����,8.0%,33.7%����,47.8%�����,28.6%和44.8%��。相對滑塊鎖定狀態(tài)��,所設(shè)計的膝關(guān)節(jié)外骨骼在滑塊解鎖狀態(tài)下的力和矩SRAM分別比鎖定狀態(tài)下低了6.4%和45.7%����。實驗結(jié)果表明����,在膝關(guān)節(jié)屈曲伸展和髖關(guān)節(jié)內(nèi)旋外旋運動兩種運動輔助功能方面,所提出的外骨骼均比現(xiàn)有的外骨骼表現(xiàn)出更低的相互作用力和力矩�����。
圖4����,髖關(guān)節(jié)內(nèi)旋外旋輔助的相互作用力和扭矩實驗結(jié)果����。%IER表示任務(wù)進度的百分比。
圖5�����,在髖關(guān)節(jié)內(nèi)旋外旋輔助期間相互作用力和力矩AM的統(tǒng)計分析結(jié)果��。
3、研究意義
本研究專注膝關(guān)節(jié)外骨骼的機構(gòu)設(shè)計及其運動輔助功能��,所設(shè)計的膝關(guān)節(jié)外骨骼在運動學(xué)透明度�����、ROM、交互作用力/力矩以及運動輔助等方面��,均展現(xiàn)出優(yōu)越的性能�����,為設(shè)計一種能夠在康復(fù)過程中同時輔助膝關(guān)節(jié)和髖關(guān)節(jié)運動的外骨骼康復(fù)機器人提供了新的思路��。
參考文獻:
G. Li, X. Liang, H. Lu, T. Su and Z. -G. Hou, “Development and Validation of a Self-Aligning Knee Exoskeleton With Hip Rotation Capability,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 32, pp. 472-481, 2024.