鋼結(jié)構(gòu)具備安全可靠�、施工方便和節(jié)省工期等優(yōu)點�����,成為了基礎設施建設中非常重要的結(jié)構(gòu)形式。鋼結(jié)構(gòu)中的構(gòu)件���,一般是通過螺栓連接、鉚釘連接或焊接形成結(jié)構(gòu)體系�。螺栓連接由于其安裝便捷�、強度高�、成本低等優(yōu)點,被廣泛應用于一些橋梁和工業(yè)廠房等鋼結(jié)構(gòu)基礎設施中�。一些大型基礎設施中螺栓連接組件的使用數(shù)量甚至達到了上百萬套�����。因此���,螺栓連接是鋼結(jié)構(gòu)中重要的組成部分之一���。
隨著服役年限的增加及外部環(huán)境的影響,螺栓連接不可避免地會出現(xiàn)松動失效甚至斷裂缺失現(xiàn)象���,使得連接部位的螺栓預緊力大幅度降低�,甚至出現(xiàn)螺栓錯位、滑移和分離脫落等情況�,嚴重影響結(jié)構(gòu)整體的可靠性和安全性�����。近年來���,國內(nèi)外發(fā)生了許多因螺栓連接失效而引發(fā)的工程事故���,因此���,發(fā)展螺栓松動檢測技術(shù)具有重要的意義�����。隨著無損檢測和健康監(jiān)測技術(shù)的發(fā)展���,研究人員提出了許多螺栓松動和缺失的檢測方法�����。
1.基于壓電傳感技術(shù)的螺栓松動檢測
基于壓電傳感技術(shù)的檢測方法主要是利用壓電陶瓷的壓電效應實現(xiàn)對螺栓松動的識別�。其原理是利用壓電陶瓷材料發(fā)送或接收信號�����,通過對信號的分析提出相應的損傷指標�����,根據(jù)損傷指標的變化來實現(xiàn)對螺栓預緊力的識別�����。
基于壓電傳感技術(shù)的螺栓松動檢測方法主要可以分為壓電波動法和壓電阻抗法���。為便于壓電傳感技術(shù)在螺栓松動檢測中的應用�,學者們首先研發(fā)了壓電智能墊片���。
1�����、壓電智能墊片
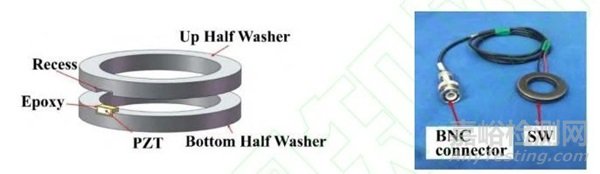
基于壓電傳感技術(shù)的檢測方法需要將壓電陶瓷傳感器與結(jié)構(gòu)表面進行耦合�����,通常是粘貼在螺栓表面�。然而這種粘貼耦合的形式限制了傳感器在使用中的靈活性�,因此研究人員提出了壓電智能墊片,將一個壓電陶瓷嵌入到兩個預先加工好的標準墊圈中���,然后利用環(huán)氧樹脂涂覆壓電陶瓷表面形成保護層�����。壓電智能墊片傳感器的設計原理圖和實物圖如圖1所示���。
圖1 壓電智能墊片(a)設計原理圖和(b)實物圖
隨后�����,研究人員對研發(fā)的壓電智能墊片傳感器的有效性進行了驗證�。Huo等通過時間反轉(zhuǎn)法對兩個墊片之間傳播的應力波能量進行了量化�����,從而建立起螺栓連接預緊力退化程度與應力波響應信號之間的關(guān)系���;然后進一步利用掃頻信號激勵智能墊片���,通過觀察阻抗特征的變化來評估螺栓的松動程度。Wang等將壓電智能墊片應用到了巖石領域的地腳螺栓預緊力識別中���,基于機電阻抗頻率指標的偏移來有效反映地腳螺栓的預緊力變化�。
2�����、壓電波動法
壓電波動法是利用兩個壓電傳感器�,其中一個傳感器用于發(fā)射信號,另一個用于接收信號�����,通過分析接收信號的特征來評估螺栓的松動狀態(tài)�。
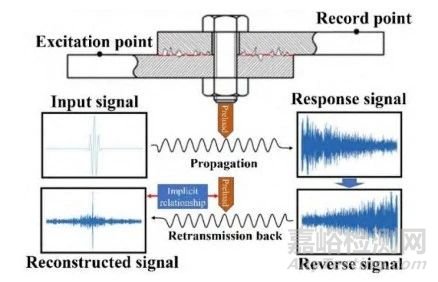
為進一步提高壓電波動法的檢測精度,學者們將時間反轉(zhuǎn)法引入到壓電波動法中�����,其過程和原理如圖2所示���。首先利用一個壓電傳感器發(fā)送激勵信號(通常是脈沖信號)�����,信號在螺栓連接的機械結(jié)構(gòu)中傳播后���,被另外一個壓電傳感器接收,將接收到的信號在時域內(nèi)進行反轉(zhuǎn)�����,并將反轉(zhuǎn)信號重新傳回激勵點得到重構(gòu)的信號�。
圖2 時間反轉(zhuǎn)法檢測螺栓松動的基本原理和過程
由于時間反轉(zhuǎn)法得到的信號只與信號傳播的路徑相關(guān),因此重構(gòu)信號在時域和頻域上都能更好地聚焦���,從而更準確的評估結(jié)構(gòu)的損傷狀態(tài)�����。重構(gòu)信號的特征與螺栓預緊力密切相關(guān)���,可以根據(jù)重構(gòu)信號的幅值大小來評估松動的嚴重程度�。
Parvasi等和Huo等分別通過有限元建模和分形接觸理論提取了不同預緊力下的螺栓連接界面的微觀接觸面積�����。結(jié)果表明���,重構(gòu)信號強度的增大主要是由于連接處的微觀接觸面積的增大所致���。此外,Ruan等驗證了時間反轉(zhuǎn)法在螺栓松動檢測中具有較強的抗干擾能力�。
時間反轉(zhuǎn)法需要在每次檢測時對信號在時域上進行反轉(zhuǎn),過程較為復雜�����,不便于工程應用�����。Cai等對傳統(tǒng)的時間反轉(zhuǎn)方法進行了改進,提出了利用虛擬時間反轉(zhuǎn)方法進行螺栓松動檢測�����。
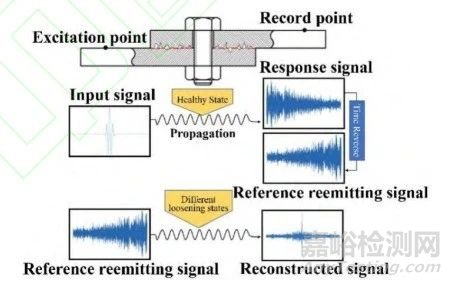
在虛擬時間反轉(zhuǎn)法中���,只對處于健康狀態(tài)的響應信號進行一次時間反轉(zhuǎn)。虛擬時間反轉(zhuǎn)法檢測螺栓松動過程如圖3所示�����。首先針對健康狀態(tài)的螺栓連接結(jié)構(gòu)���,在激勵點處輸入脈沖信號�����,接收點上的傳感器采集響應信號���,隨后將響應信號在時域內(nèi)反轉(zhuǎn)。在健康狀態(tài)下獲得的反轉(zhuǎn)信號被記錄為參考重發(fā)射信號(RRS)�����。在后續(xù)的螺栓松動監(jiān)測中,激勵點處只發(fā)送RRS信號�����。最后�����,通過分析重建信號的幅值特征可以表征螺栓連接的松動狀態(tài)���。在現(xiàn)有的虛擬時間反轉(zhuǎn)法研究中,重構(gòu)信號的大小通常用歸一化的峰值�、聚焦波包能量比來表示。
圖3 虛擬時間反轉(zhuǎn)法檢測螺栓松動的基本原理和過程
針對時間反轉(zhuǎn)法無法識別螺栓微小松動的問題�����,學者們提出了基于振動聲調(diào)制法的螺栓的松動監(jiān)測方法���。
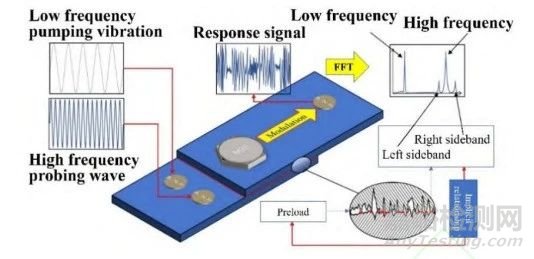
振動聲調(diào)制法是聲非線性超聲法的一種�����,應用于螺栓松動檢測的流程及原理如圖4所示���。在信號發(fā)送端產(chǎn)生兩種激勵信號���,一種是低頻正弦振動信號,另一種是高頻超聲波信號�����。在微觀尺度下���,鋼板界面較為粗糙,存在著許多的凸起和凹陷�。當?shù)皖l正弦振動和高頻超聲波混合并穿過鋼板界面時,低頻正弦振動使接觸界面產(chǎn)生“呼吸”效應�����,從而在傳播高頻超聲波信號時出現(xiàn)調(diào)制特征�。預緊力減小時�,鋼板實際接觸面積減小,接觸非線性增大�����,使得頻譜上高頻處左右旁頻的振幅增加���。因此,旁頻振幅可以用來表示螺栓松動的嚴重程度�����。
圖4 振動聲調(diào)制法檢測螺栓松動的基本原理和過程
研究結(jié)果表明���,高頻和低頻振動信號的幅值和頻率對調(diào)制響應信號和松動檢測都有顯著影響。Zhang等首先采用掃頻法確定螺栓連接的固有頻率���,然后將二階響應信號中強度最大的固有頻率作為低頻振動信號的頻率。為了增強調(diào)制效果�,Zhang和Wang等選擇一定范圍內(nèi)的掃描信號作為高頻振動信號。此外���,Zhao等分析了低頻振動信號的幅值對調(diào)制結(jié)果的影響�����。由于螺栓不同松動狀態(tài)的固有頻率會發(fā)生變化�����,Zhao等提出對低頻和高頻信號均采用掃頻激勵�,具有更好的識別魯棒性。
3�����、壓電阻抗法
壓電波動法通常需要兩個壓電傳感器才能實現(xiàn)螺栓松動的檢測�����,為節(jié)約成本���,學者們提出了基于壓電阻抗法的螺栓檢測方法,只用一個傳感器就可以實現(xiàn)螺栓松動的檢測�����。
壓電阻抗法檢測螺栓松動的原理是:當螺栓松動時���,連接部位的機械阻抗會發(fā)生改變�����,從而壓電傳感器的電阻抗也會隨之發(fā)生變化�����。因此�����,通過分析壓電傳感器中的阻抗信號�,可以評估螺栓的連接狀態(tài)�。圖5顯示了基于機電阻抗法的螺栓松動檢測過程和原理。壓電陶瓷的電阻抗與螺栓連接結(jié)構(gòu)的機電阻抗直接相關(guān)���,因此通過阻抗分析儀測量壓電陶瓷的電阻抗�,并將其與參考值進行比較�����,可以識別螺栓的松動程度�。
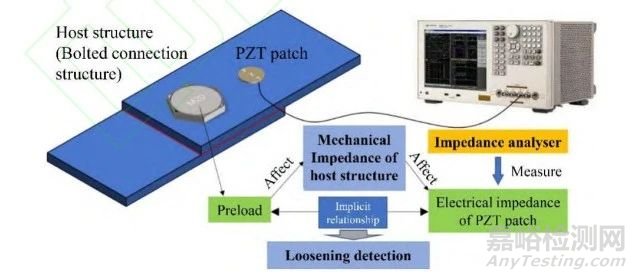 3圖5 阻抗法檢測螺栓松動的基本原理和過程
3圖5 阻抗法檢測螺栓松動的基本原理和過程
丁杰城分析了阻抗法識別螺栓松動的原理���,研發(fā)了基于壓電阻抗法的螺栓松動實驗臺,并編寫了壓電驅(qū)動軟件�。
姜世宇等結(jié)合阻抗法和卷積神經(jīng)網(wǎng)絡對空間結(jié)構(gòu)螺栓球的預緊力進行了檢測,研究結(jié)果表明該方法可以識別螺栓節(jié)點的早期松動�。
王琳濤通過多頻段的阻抗峰值移動,實現(xiàn)了法蘭結(jié)構(gòu)中的螺栓松動程度分析���。
Pavelko等提出了約束PZT二維模型�,結(jié)合有限元模態(tài)分析���,實現(xiàn)了對直升機螺栓松動的監(jiān)測�。
Wang采用概率神經(jīng)網(wǎng)絡和壓電阻抗技術(shù)對90個螺栓結(jié)構(gòu)試件的螺栓預緊力進行了識別���,結(jié)果表明識別該方法的松動識別準確率超過90%�����。
Zhou等基于壓電阻抗法,結(jié)合內(nèi)置圖卷積網(wǎng)絡模型�,實現(xiàn)了多個螺栓預緊力損失的定量分析。
Du等考慮到環(huán)境溫度對機電阻抗的影響���,提出了一種用于識別螺栓松動的多任務深度卷積神經(jīng)網(wǎng)絡�,該網(wǎng)絡由一個溫度補償子網(wǎng)和一個用于識別螺栓松動狀態(tài)的輕量級損傷識別子網(wǎng)組成,結(jié)果表明有限樣本訓練的多任務網(wǎng)絡能夠在溫度變化環(huán)境下實現(xiàn)準確的損傷識別�����。
2.基于光纖傳感技術(shù)的螺栓松動檢測
布拉格光纖光柵(Bragg fiber grating���,BFG)傳感器因具有體積小�、精度高�、抗干擾能力強等優(yōu)點而受到結(jié)構(gòu)健康監(jiān)測領域研究人員的廣泛關(guān)注。當外界物理量如溫度或應變等發(fā)生變化時�,會導致光纖光柵的柵距發(fā)生改變,進而會影響在光纖光柵處經(jīng)過環(huán)行器反射回來的反射光波長�,根據(jù)波長的變化,可以推導出外界物理量的變化�。基于光纖傳感技術(shù)的螺栓檢測主要是根據(jù)嵌入到螺栓中的光纖光柵傳感器測量到溫度或應變等物理量的變化�����,來檢測螺栓的故障�����。
為了檢測螺栓是否發(fā)生松動,Khomenko等于2016年提出了利用嵌入螺栓桿中的單個光纖布拉格光柵傳感器來監(jiān)測螺栓的軸向預緊力�。
為了測量螺栓所承受的剪切力,Ren等提出一種基于多個光纖光柵嵌入式傳感器的智能剪切型螺栓�����,如圖6所示�����。根據(jù)等效彎矩與剪切力之間的線性關(guān)系�,該智能螺栓利用波長變化計算剪切力,可以實現(xiàn)同時測量螺栓軸向拉力與剪切力�。
圖6 基于光纖光柵傳感的智能螺栓
為了避免溫度對螺栓預緊力的影響,師琪等提出了一種新型智能螺栓�,可以實現(xiàn)螺栓軸力和溫度的同步監(jiān)測。
為了減少嵌入光纖光柵傳感器對與螺栓結(jié)構(gòu)的破壞�����,Chen等研發(fā)了一種基于光纖光柵傳感技術(shù)的智能螺栓墊圈傳感器�,如圖7所示,它利用螺栓預緊力與墊圈周向應變之間的線性關(guān)系來測量螺栓的預緊力�。
圖7 基于光纖光柵傳感的智能螺栓墊圈
3.基于數(shù)字圖像處理技術(shù)的螺栓松動/缺失檢測
近年來�����,隨著圖像處理技術(shù)的發(fā)展和圖像采集設備的普及,基于數(shù)字圖像處理技術(shù)的螺栓檢測方法由于成本低�、效率高等優(yōu)勢受到極大的關(guān)注,它的基本原理是利用計算機對攝像機采集到的螺栓圖像進行處理和分析�����,提取和識別螺栓松動或缺失發(fā)生時的圖像特征�����,以實現(xiàn)螺栓故障的檢測���。
螺栓松動會導致螺桿螺紋暴露���,Cha等利用傳統(tǒng)的圖像處理技術(shù)提取螺栓松動敏感特征并結(jié)合支持向量機技術(shù)來檢測螺栓松動。
為了提高方法的魯棒性�����,王寶麗等提出一種基于卷積神經(jīng)網(wǎng)絡的螺桿裸露螺紋數(shù)量測量方法來檢測螺栓是否發(fā)生松動�。
由于螺栓早期松動不會造成螺桿螺紋暴露,只會造成螺栓發(fā)生一定角度的旋轉(zhuǎn)�����,Park等開發(fā)了一種基于圖像處理技術(shù)的螺栓角度估計和松動檢測方法。
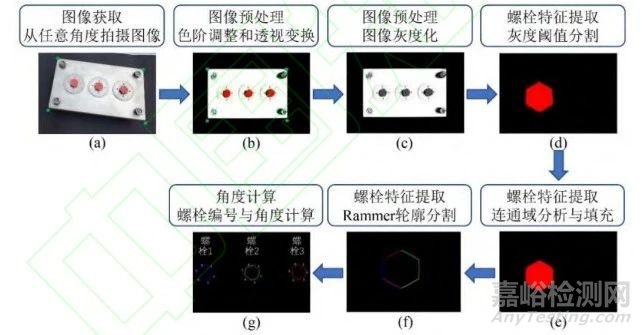
為了提高螺栓松動旋轉(zhuǎn)角度測量精度���,周靖等提出了一種基于機器視覺技術(shù)的螺栓松動旋轉(zhuǎn)角度測量方法�,該方法能夠有效地檢測螺栓早期松動后產(chǎn)生的角度旋轉(zhuǎn)�,流程圖如圖8所示。
圖8 基于機器視覺技術(shù)的螺栓旋轉(zhuǎn)角度測量過程
螺栓松動旋轉(zhuǎn)角度測量結(jié)果受到拍攝角度�、光照條件和背景噪聲等因素的影響,為了提高螺栓角度測量的魯棒性���,Zhao等提出一種基于深度學習的螺栓松動旋轉(zhuǎn)角度測量方法���,利用目標檢測算法檢測螺栓表面的特征并計算旋轉(zhuǎn)角度來檢測螺栓松動。
Pan等提出一種基于視覺的集成方法�����,用于交互式檢測和實時跟蹤螺栓的松動旋轉(zhuǎn)���。
Lao等綜合考慮了攝像頭焦距���、拍攝角度和照明條件對螺栓檢測和角度測量的影響���,提出了一種可用于不同成像條件下的螺栓松動旋轉(zhuǎn)角度測量方法���。
在此研究基礎上���,Zhang等引入具有方向感知能力的目標檢測算法,克服了水平目標檢測框?qū)τ诜谴怪甭菟ㄋ蓜訖z測不準的問題���。
此外���,Wang等為了克服單目視覺檢測方法中存在的相機視角引起測量誤差的問題,提出一種基于雙目視覺的螺栓松動旋轉(zhuǎn)角度測量方法�����。
Pan等提出一種基于無人機的三維視覺螺栓松動自動檢測方法���,提高了螺栓松動識別的效率�����。
除了螺栓松動�,針對螺栓缺失問題,趙欣欣等利用卷積神經(jīng)網(wǎng)絡提出了一種螺栓缺失圖像識別方法���。
為了進一步確定圖像中螺栓缺失的數(shù)量和位置�����,Zhou等提出了一種基于計算機視覺的螺栓缺失檢測方法���,通過基于深度學習的目標檢測技術(shù)自動從螺栓缺失圖像數(shù)據(jù)集中提取螺栓缺失的圖像特征,實現(xiàn)了螺栓缺失的自動檢測�����,如圖9所示�����。
圖9 基于目標檢測技術(shù)的螺栓缺失檢測
Yang等在對比分析了不同深度學習目標檢測技術(shù)的基礎上���,提出了一種基于透視變換和交并比的螺栓缺失檢測方法�����。
陳欣瑞等針對手機移動端模型輕量化的需求�,開發(fā)了一種基于改進YOLOv5的螺栓缺失檢測方法。
4.基于敲擊聲法的螺栓松動檢測
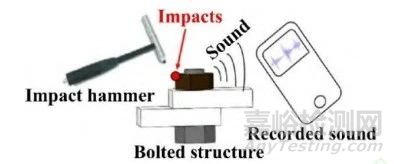
敲擊聲檢測法是一種無需在結(jié)構(gòu)表面布置傳感器的無損檢測方法�。基于敲擊聲法的螺栓松動檢測的基本原理是螺栓松動引起的連接特性變化會影響敲擊產(chǎn)生的音頻信號�,如圖10所示。
圖10 敲擊聲法檢測螺栓松動的基本原理和過程
近年來�����,敲擊聲法在螺栓松動檢測方面取得了許多研究進展�。2018年�����,Kong等首次將敲擊聲法應用于螺栓松動識別���。研究人員提取了敲擊聲信號的功率譜密度作為特征�,并使用決策樹模型對不同預緊力工況下的螺栓進行了識別和分類���。結(jié)果表明���,螺栓的預緊力分類精度超過90%,驗證了敲擊聲法在螺栓松動檢測中的可行性。
Yuan等提出了一種基于經(jīng)驗模態(tài)分解和反向傳播神經(jīng)網(wǎng)絡的螺栓松動識別方法�����,并在聲信號中添加了不同程度的噪聲�。實驗結(jié)果顯示該方法能夠避免人為選擇參數(shù)對識別效果的影響,并具有較好的抗噪聲能力���。
在此基礎上���,Wang等考慮了界面粗糙度的差異,將螺栓預緊力等效為連接件的剛度�����。他們通過虛擬材料法和逐層理論將螺栓連接件建模為層壓板�,并利用聲輻射模態(tài)法獲取敲擊聲信號的聲壓級,從而提高了對螺栓組松動的識別精度�����。
Zhang等則采用智能手機采集敲擊聲信號�,并利用支持向量機對數(shù)據(jù)集進行訓練和分類,極大地降低了敲擊聲法在螺栓松動識別中的使用成本�。
另外���,Yang等運用快速傅里葉變換和卷積神經(jīng)網(wǎng)絡對螺栓的預緊力進行回歸預測,減少了對預緊力的訓練工況�。
考慮到在某些特殊情況下直接敲擊螺栓并不容易,Liu等提出了一種基于相域全極群延遲函數(shù)的敲擊方法���,在遠離螺栓的鋼板結(jié)構(gòu)上敲擊�,并利用卷積神經(jīng)網(wǎng)絡分析聲信號獲取螺栓的預緊力���,實現(xiàn)了在遠離螺栓的情況下對螺栓預緊力的識別���。
Wang等利用一維記憶增強卷積長短期網(wǎng)絡對螺栓預緊力進行識別���,避免了手動特征的提取�����,可以實現(xiàn)對多種類型螺栓預緊力的識別���。
為了識別螺栓早期的輕微變化,Yuan等提出了一種基于敲擊聲信號本征特征提取的ResNet集成網(wǎng)絡���,對極早期螺栓松動進行識別�����。
為了方便在實際中應用敲擊聲法���,Yuan等開發(fā)了一套聲學振動的ios應用程序�。在實際工程中�,敲擊螺栓所產(chǎn)生的聲信號通過手機程序傳輸?shù)胶蠖耍ㄟ^后端已經(jīng)訓練好的卷積神經(jīng)網(wǎng)絡對螺栓預緊力進行識別���,極大提高了敲擊聲法在螺栓預緊力識別過程中的便捷性�����。
結(jié)論
螺栓連接由于強度高�����、成本低�����、安裝便捷在土木工程中得到廣泛應用�����,對其失效情況進行準確及時的檢測對于保障結(jié)構(gòu)的安全運營非常重要���。
上述介紹了壓電傳感技術(shù)�����、光纖傳感技術(shù)���、數(shù)字圖像處理技術(shù)和敲擊聲法在螺栓松動和缺失檢測中的應用,但目前提出的大量方法由于各種原因?qū)е缕湓趯嶋H工程中應用較少甚至難以應用�����。
壓電傳感技術(shù)���、光纖傳感技術(shù)可以準確識別螺栓的預緊力,但實際應用中由于螺栓數(shù)量眾多而需要布置大量傳感器�,由此導致成本較高而限制其推廣應用。
敲擊聲法不需要安裝傳感器�,但每次識別螺栓預緊力時都需要接觸螺栓,由此也會造成檢測時間和檢測成本的增加�����。
數(shù)字圖像處理技術(shù)能夠?qū)崿F(xiàn)遠距離螺栓松動或缺失的識別,具有效率高���、成本低的優(yōu)點���,但無法檢測螺栓的輕微松動,且無法獲得螺栓預緊力數(shù)值���。
通過對現(xiàn)有技術(shù)的分析���,螺栓失效檢測技術(shù)在未來應關(guān)注以下幾點:
1、現(xiàn)有檢測技術(shù)的實現(xiàn)成本過高���,主要集中在高精度傳感器和采集設備的安裝與維護�。因此���,未來應結(jié)合實際工程中螺栓檢測技術(shù)的需求���,研發(fā)低成本的信號采集與處理設備,以便更好地實現(xiàn)螺栓檢測技術(shù)的工程應用�。
2���、現(xiàn)有的研究大多數(shù)針對單個螺栓進行檢測,但是實際工程中的連接部位存在著大量螺栓�。因此,未來的研究中要針對螺栓群中個別螺栓失效的問題�,發(fā)展相應的識別和評估算法。
3�����、現(xiàn)有檢測技術(shù)大多針對正常運營條件下的螺栓失效檢測���,然而實際土木工程服役環(huán)境通常比較惡劣�,尤其是高空���、高寒���、存在輻射等位置的螺栓失效檢測問題,依然具有非常具有挑戰(zhàn)性���。因此,未來應關(guān)注與發(fā)展服役于惡劣環(huán)境中螺栓的檢測技術(shù)�����,以增強螺栓松動檢測的可靠性。
4���、除了常規(guī)的螺栓失效定期檢測外�����,對于重要的螺栓連接節(jié)點�,還需要對其健康狀況進行長期監(jiān)測�,以實現(xiàn)其輕微松動的準確檢測。未來應結(jié)合物聯(lián)網(wǎng)技術(shù)開發(fā)螺栓健康狀況的長期監(jiān)測技術(shù)�����,實現(xiàn)對螺栓健康狀況的實時評估和螺栓失效的提前預警�����。
作者:霍林生�����,李宏男,楊卓棟�����,周靖
工作單位:大連理工大學 海岸和近海工程國家重點實驗室
來源:工業(yè)建筑�、智能緊固件及緊固工具