導(dǎo) 語
近期,由韓國科學(xué)技術(shù)院電氣工程學(xué)院的 Jae-Woong Jung 教授和韓國科學(xué)技術(shù)院機械工程系的 Jung Kim 教授領(lǐng)導(dǎo)的聯(lián)合研究小組于 1 月 23 日宣布,他們已成功開發(fā)出可以以高水平電感應(yīng)生理信號的可拉伸和粘合的微針傳感器����,且該傳感器使用過程中不受用戶皮膚狀態(tài)的影響����。相關(guān)成果發(fā)表在《Science Advance》上��。
1、研究背景
對于可穿戴機器人來說�����,要識別人類運動背后的目的并用于康復(fù)治療����,需要可穿戴的電生理傳感器來提供精確的肌電圖。然而����,現(xiàn)有的傳感器通常會隨著時間的推移顯示出信號質(zhì)量惡化的情況,并且極易受用戶皮膚狀況的影響��。此外由于傳感器接觸表面無法跟上皮膚的變形����,具有較高機械硬度的傳感器會產(chǎn)生噪音����。這些缺點限制了可穿戴機器人的可靠性以及使用者對機器人的長期控制。
2����、研究概述
基于功能化導(dǎo)電聚合物的設(shè)計,研究團隊設(shè)計了功能化聚苯胺基時序黏附水凝膠貼片。它可以實現(xiàn)心臟的同步機械生理監(jiān)測和電耦合治療�����,并牢固附著在心臟表面監(jiān)測心臟的機械運動和電活動����。
研究小組推出了一種可拉伸的微針粘合貼片(stretchable microneedle adhesive patch,SNAP)����。該貼片具有柔軟、可粘合和組織適應(yīng)性的特點����,能夠在無需皮膚準(zhǔn)備的前提下,確保長期可靠的電生理(Electrophysiological����,EP)信號記錄。SNAP具有蛇形互聯(lián)的可拉伸部件��,可以適應(yīng)動態(tài)的皮膚組織��,有助于提高長期佩戴舒適度��。在可拉伸互聯(lián)件下方加入了硅微針陣列,使其能夠穿透角質(zhì)層與表皮直接接觸但不會到達痛覺感受器所在位置�����。這種設(shè)計有助于高質(zhì)量的EP信號采集����,而且避免了疼痛與備皮。此外�����,包含銀撥片和高粘性有機硅的導(dǎo)電粘合劑不僅通過提供額外的導(dǎo)電通路來增強電極-皮膚界面��,還確保傳感器在使用過過程中與皮膚的牢固粘附�����。
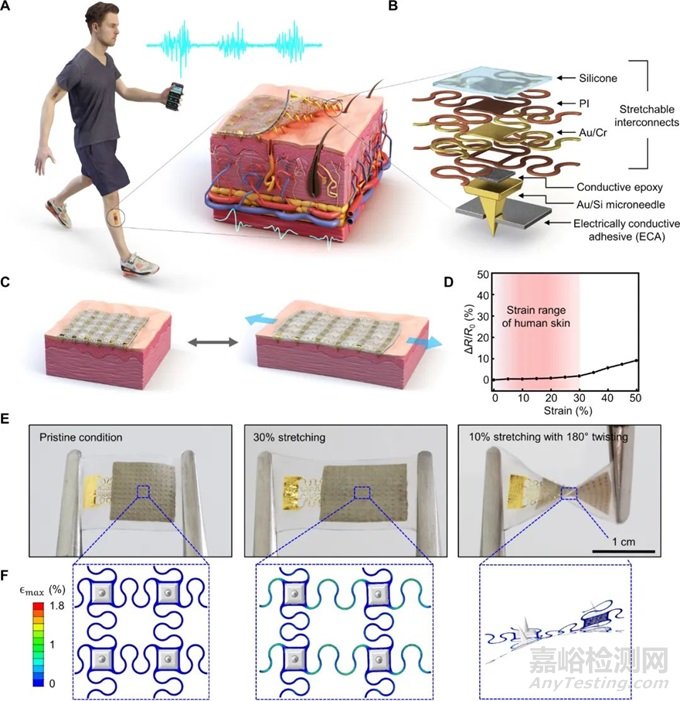
圖1 SNAP 的設(shè)計和工作理念�����。( A ) SNAP 的整體系統(tǒng)配置和應(yīng)用示意圖�����。該貼片式設(shè)備集成了皮膚適形SNAP�����,無論皮膚狀況如何��,都能夠進行可靠����、長期的 EP 信號監(jiān)測。插圖顯示了柔軟的組織適應(yīng)型 SNAP 的特寫視圖����,該 SNAP 使用微針穿透角質(zhì)層以直接進入表皮。 ( B ) SNAP 的分解示意圖�����,由可拉伸蛇形互連��、鍍金硅微針和由銀片-硅復(fù)合材料制成的導(dǎo)電粘合劑組成��。 ( C ) SNAP 的示意圖��,突出顯示其適應(yīng)組織拉伸的能力�����。 ( D ) SNAP 的相對電阻變化作為拉伸應(yīng)變的函數(shù)。當(dāng) SNAP 受到 30% 拉伸時�����,其電阻變化可以忽略不計�����,這對應(yīng)于人體皮膚的最大拉伸范圍 (8 .49)����。這凸顯了其在拉伸變形下保持穩(wěn)定電測量的能力。 ( E ) 光學(xué)圖像顯示 SNAP 的高機械順應(yīng)性:(左)原始狀態(tài)��;(中)30% 拉伸����;(右)180° 扭轉(zhuǎn) 10% 拉伸。 ( F ) SNAP 的有限元建模�����,其變形配置對應(yīng)于 (E) 中所示的配置�����。
通過一系列研究��,研究小組全面測試了 SNAP 的材料�����、機械和電氣特性��,證實了它們在各種條件下進行高度可靠的長期 EP 信號監(jiān)測的潛力����。有限元分析結(jié)果以及與其他類型 EP 傳感器(例如柔性微針電極和凝膠電極)的實驗比較表明,由于SNAP具有彈性和滲透性�����,這種傳感器顯著降低了皮膚變形過程中的組織應(yīng)力��,并提高了信噪比��。外骨骼機器人閉環(huán)操作的概念驗證演示凸顯了免備皮無線 SNAP 系統(tǒng)的可靠性��,展示了其在人機界面應(yīng)用中的潛力�����,允許佩戴者快速、無縫設(shè)置和自由活動����。
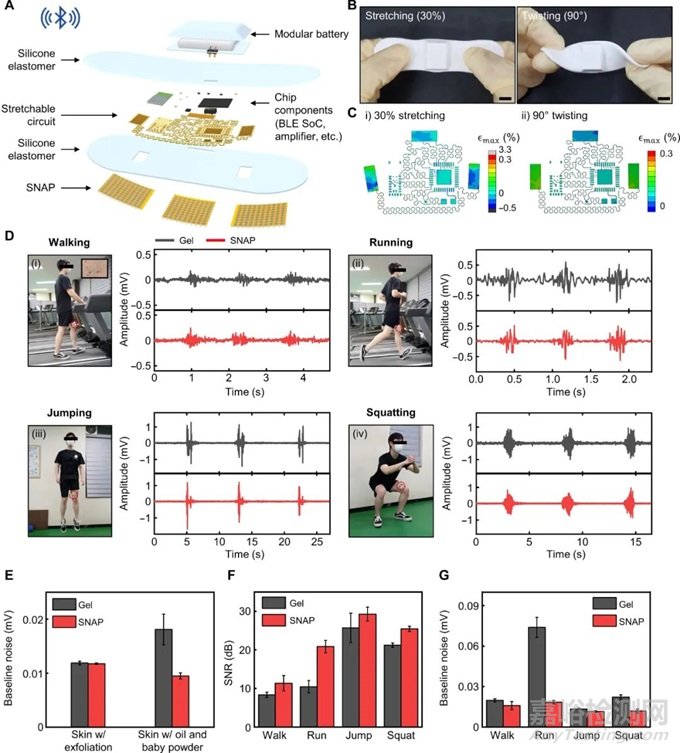
圖2 無線SNAP系統(tǒng)在各種步行運動期間的肌電圖監(jiān)測性能 ( A ) 無線 SNAP 系統(tǒng)的分解示意圖。該無線系統(tǒng)由 SNAP��、用于無線 EP 記錄的可拉伸電路�����、封裝有柔軟����、生物相容性彈性體的可拆卸鋰電池組成。( B ) 在拉伸(ε = 30%�����;i)和扭轉(zhuǎn)(90° 扭轉(zhuǎn)�����;ii)過程中拍攝的設(shè)備照片。( C ) 對應(yīng)于 (B) 的變形情況下的裝置的有限元模擬結(jié)果�����。( D ) 顯示不同類型的動態(tài)運動及其相應(yīng)的 EMG 記錄的圖像�����,使用與凝膠電極(灰色圖)和 SNAP(紅色圖)集成的貼片型設(shè)備進行記錄�����。人類受試者執(zhí)行四種類型的步行運動:(i)行走��、(ii)跑步����、(iii)跳躍和(iv)蹲下��,目標(biāo)肌肉是股內(nèi)側(cè)肌�����。( E到G )記錄的EMG信號質(zhì)量圖�����,包括預(yù)處理和污染皮膚狀況 (E) 的基線噪聲幅度、信噪比 (F) 和四種動態(tài)運動的基線噪聲幅度 (G)����。
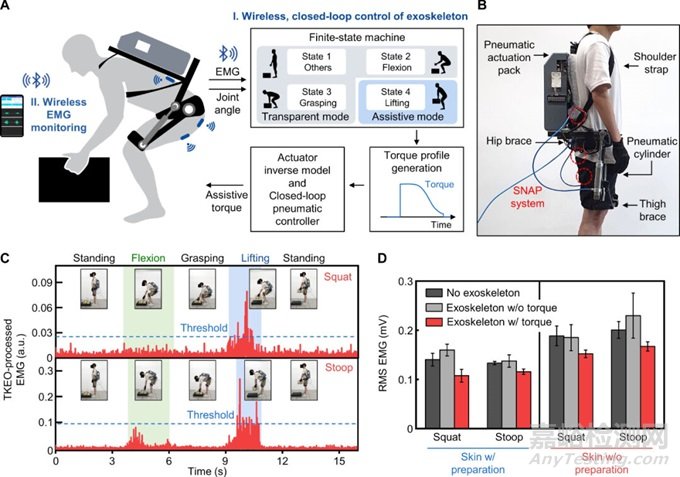
圖3 演示無線SNAP系統(tǒng)用于外骨骼機器人閉環(huán)控制的人機交互界面。( A ) 圖示描述了外骨骼機器人的系統(tǒng)架構(gòu)和控制策略�����。連接到下肢肌肉的 SNAP 系統(tǒng)將肌電信號無線傳輸?shù)酵夤趋罊C器人控制器以觸發(fā)輔助操作����。連接到背部肌肉的另一個 SNAP 系統(tǒng)可監(jiān)測肌肉活動,以評估機器人輔助性能��。( B )氣動背部支撐外骨骼系統(tǒng)的硬件配置����。氣缸的線性驅(qū)動使該裝置推動軀干,產(chǎn)生輔助髖關(guān)節(jié)扭矩��,以舉起沉重的外部負(fù)載��。SNAP 系統(tǒng)連接到 L1����、GM 和 BF 肌肉����,用于操作外骨骼機器人并驗證其輔助性能����。( C ) 在深蹲舉重(頂部)和彎腰舉重(底部)的單個周期中實時測量觸發(fā)肌的TKEO-EMG信號�����。( D ) 和沒有機器人輔助的 RMS EMG 比較��。當(dāng)使用機器人輔助時�����,無論是否備皮�����、出汗水平如何����,背部肌肉活動都會大大減少(預(yù)處理的皮膚和未預(yù)處理和出汗的皮膚條件下平均減少18.1%)。
3、研究意義
這項工作探討了 SNAP 免備皮長期 EP 信號監(jiān)測的概念和設(shè)計策略�����。SNAP 的剛軟混合結(jié)構(gòu)具有獨特的功能����,例如通過角質(zhì)層直接進入表皮和組織順應(yīng)性。這些特性不僅確保了對皮膚分泌物和污染的高度免疫力��,而且還提供了長時間使用的舒適性����。與商用凝膠電極相比,具有導(dǎo)電粘合劑的SNAP由于其高導(dǎo)電性和粘合性�����,提供了更為優(yōu)異的皮膚傳感器界面��,體現(xiàn)為運動偽影和基線噪聲減少�����。外骨骼機器人與 SNAP 系統(tǒng)的無線閉環(huán)操作演示進一步驗證了該設(shè)備在復(fù)雜的真實人機交互應(yīng)用中的實用性����。
為了推廣應(yīng)用�����,需要研究適合大規(guī)模生產(chǎn)的新材料和更簡單的制造方法����,以降低與當(dāng)前依賴于微機電系統(tǒng)工藝的制造方法相關(guān)的成本和復(fù)雜性�����。此外�����,開發(fā)帶有剛度可調(diào)節(jié)微針的可拉伸電極����,這種電極是剛性的����,便于皮膚穿透,然后變得柔軟以適應(yīng)組織��,這對于完全消除微針-皮膚界面的機械不匹配,確保長期舒適感至關(guān)重要��。
參考文獻:
Heesoo Kim et al.Skin preparation–free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control.Sci. Adv.10,eadk5260(2024).DOI:10.1126/sciadv.adk5260