一����、研究背景與意義
滾珠絲杠副作為數(shù)控機(jī)床進(jìn)給系統(tǒng)的核心部件��,承擔(dān)著“旋轉(zhuǎn)運(yùn)動-直線運(yùn)動”轉(zhuǎn)換的關(guān)鍵功能����,其精度與可靠性直接決定機(jī)床加工質(zhì)量與生產(chǎn)安全。據(jù)行業(yè)統(tǒng)計�����,數(shù)控機(jī)床進(jìn)給系統(tǒng)故障中約40%與滾珠絲杠副退化相關(guān)����,輕微損傷即可導(dǎo)致定位誤差增大,嚴(yán)重時引發(fā)設(shè)備停機(jī)����,造成日均數(shù)萬元的經(jīng)濟(jì)損失����。然而����,滾珠絲杠副的監(jiān)測面臨兩大核心瓶頸,制約了傳統(tǒng)方法的應(yīng)用:
1.1 故障數(shù)據(jù)極度稀缺
滾珠絲杠副作為高可靠性部件��,設(shè)計壽命通常超過10000小時,且實(shí)際運(yùn)維中為避免故障風(fēng)險,往往在出現(xiàn)明顯退化前就提前更換�����,導(dǎo)致故障狀態(tài)監(jiān)測數(shù)據(jù)幾乎無法獲取。傳統(tǒng)智能監(jiān)測方法(如SVM��、深度信念網(wǎng)絡(luò))需大量故障樣本訓(xùn)練模型�����,在該場景下完全失效;基于物理機(jī)理的方法(如斷裂力學(xué)模型)則需復(fù)雜的先驗(yàn)知識(如表面粗糙度�����、預(yù)緊力)����,難以適應(yīng)實(shí)際工況變化。
1.2 傳統(tǒng)監(jiān)測方法局限性顯著
- 信號處理方法(如經(jīng)驗(yàn)?zāi)B(tài)分解�����、多尺度熵)依賴專家手動提取特征��,需掌握滾珠絲杠副動力學(xué)特性與信號處理技術(shù),耗時且難以自動化����,無法滿足在線監(jiān)測需求;
- 閾值判定方法(如3σ準(zhǔn)則)易受正常工況的隨機(jī)噪聲與沖擊干擾,導(dǎo)致閾值設(shè)置寬松�����,無法及時檢測早期退化(如輕微疲勞點(diǎn)蝕)����,往往在故障嚴(yán)重后才報警;
- 常規(guī)自編碼器(AE)等模型雖能無監(jiān)督學(xué)習(xí),但為確定性映射�����,難以捕捉振動信號的隨機(jī)隱含分布����,對早期微弱退化的敏感性不足。
針對上述痛點(diǎn)�����,本文提出“基于卷積變分自編碼器(CNVAE)與動態(tài)核密度估計的異常監(jiān)測方法”��,通過無監(jiān)督學(xué)習(xí)正常數(shù)據(jù)分布、動態(tài)概率判定異常�����,實(shí)現(xiàn)“無需故障數(shù)據(jù)��、早期精準(zhǔn)監(jiān)測”的目標(biāo)�����,為滾珠絲杠副預(yù)測性維護(hù)提供技術(shù)支撐。
二、主要研究內(nèi)容
本文圍繞“無故障數(shù)據(jù)下的異常監(jiān)測”核心目標(biāo)��,構(gòu)建“健康指標(biāo)構(gòu)建-異常判定”的兩階段技術(shù)框架,具體研究內(nèi)容如下:
2.1 方法整體架構(gòu)
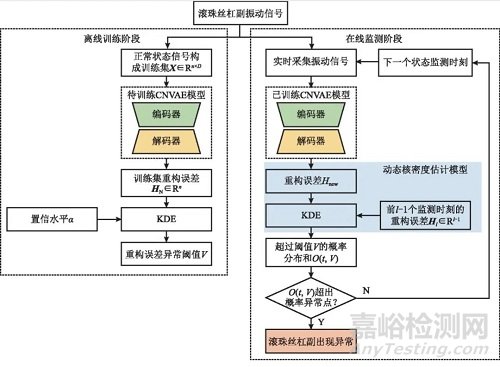
論文提出的方法分為離線訓(xùn)練與在線監(jiān)測兩大階段����,流程如圖1所示:
1. 離線訓(xùn)練階段:僅使用滾珠絲杠副早期正常狀態(tài)的振動信號�����,訓(xùn)練CNVAE模型�����,學(xué)習(xí)正常數(shù)據(jù)的隱含分布;通過核密度估計(KDE)分析正常數(shù)據(jù)的重構(gòu)誤差��,設(shè)定異常閾值�����;
2. 在線監(jiān)測階段:實(shí)時采集振動信號�����,輸入訓(xùn)練好的CNVAE模型得到重構(gòu)誤差(健康指標(biāo))����;利用滑動窗口選取多時刻重構(gòu)誤差��,輸入動態(tài)核密度估計模型,通過概率分布變化判定是否異常����。
2.2 卷積變分自編碼器(CNVAE)的健康指標(biāo)構(gòu)建
CNVAE是方法的核心�����,旨在通過無監(jiān)督學(xué)習(xí)正常數(shù)據(jù)分布,以“重構(gòu)誤差”量化滾珠絲杠副的健康狀態(tài)��,解決“無故障數(shù)據(jù)”與“早期特征難提取”的問題��。
2.2.1 CNVAE的網(wǎng)絡(luò)結(jié)構(gòu)
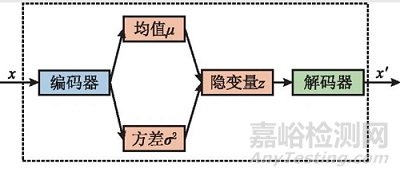
考慮到滾珠絲杠副的振動信號為一維時序數(shù)據(jù)�����,采用一維卷積神經(jīng)網(wǎng)絡(luò)(1DCNN) 構(gòu)建CNVAE的編碼器與解碼器����,避免二維CNN對時序信號的冗余處理�����,提升計算效率:
- 編碼器:4層1D卷積層(激活函數(shù)LeakyReLU)��,逐步提取振動信號的局部時序特征(如早期退化的微小沖擊),最后通過全連接層生成隱變量的均值與方差(隱變量服從高斯分布,維度設(shè)為10����,平衡降維效果與擬合能力)�����;
- 解碼器:4層1D反卷積層,基于隱變量重構(gòu)原始振動信號��,通過全連接層輸出與輸入維度一致的重構(gòu)信號����;- 訓(xùn)練目標(biāo):最小化“重構(gòu)誤差”(輸入與重構(gòu)信號的均方差)與“KL散度”(正則化項(xiàng)�����,確保隱變量分布接近標(biāo)準(zhǔn)高斯分布)����,平衡重構(gòu)精度與模型泛化能力����。
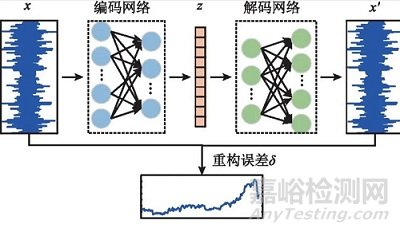
2.2.2 健康指標(biāo)定義
訓(xùn)練完成的CNVAE僅能精準(zhǔn)重構(gòu)正常狀態(tài)的振動信號(重構(gòu)誤差小�����,通常<0.2)����;當(dāng)滾珠絲杠副出現(xiàn)早期退化(如滾道輕微點(diǎn)蝕)時�����,實(shí)時振動信號偏離正常分布�����,CNVAE重構(gòu)效果顯著下降��,重構(gòu)誤差大幅增大(早期退化>0.3�����,嚴(yán)重退化>0.8)�����。因此��,將重構(gòu)誤差直接作為健康指標(biāo)����,量化滾珠絲杠副偏離正常狀態(tài)的程度,無需手動提取特征�����。
2.3 動態(tài)核密度估計的異常判定
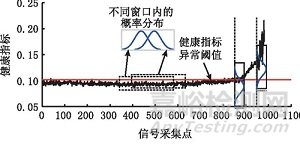
傳統(tǒng)3σ準(zhǔn)則通過單個監(jiān)測點(diǎn)的健康指標(biāo)是否超閾值判定異常����,易受隨機(jī)噪聲干擾(如正常工況的瞬時沖擊)�����,導(dǎo)致誤報或漏報。本文提出動態(tài)核密度估計(KDE) 方法�����,基于“滑動窗口內(nèi)健康指標(biāo)的概率分布變化”判定異常����,提升穩(wěn)定性與敏感性����。
2.3.1 異常閾值設(shè)定
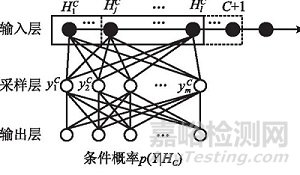
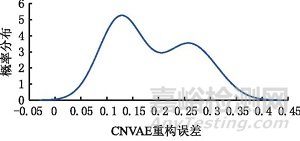
離線階段,將正常數(shù)據(jù)的重構(gòu)誤差輸入KDE模型(非參數(shù)化概率估計�����,無需假設(shè)分布形式)��,得到其概率密度函數(shù)�����;設(shè)定置信水平為99.9%(對應(yīng)虛警率0.1%)����,通過累積分布函數(shù)計算得到重構(gòu)誤差異常閾值(論文中為0.3978),即正常狀態(tài)下僅有0.1%的重構(gòu)誤差會超過該值�����。
2.3.2 滑動窗口與概率判定
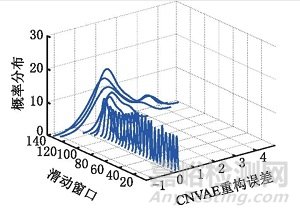
在線監(jiān)測時��,采用長度為25����、滑動距離為1的時間窗口(平衡穩(wěn)定性與敏感性),選取“當(dāng)前時刻重構(gòu)誤差+前24個時刻重構(gòu)誤差”構(gòu)成時序序列�����,輸入KDE模型計算窗口內(nèi)重構(gòu)誤差的概率分布:
- 若窗口內(nèi)“超過閾值的重構(gòu)誤差概率和”>0.1%,表明異常指標(biāo)占比超過正常波動范圍�����,判定滾珠絲杠副出現(xiàn)早期退化����;- 隨著窗口滑動����,正常階段的重構(gòu)誤差逐漸被實(shí)時數(shù)據(jù)替代�����,動態(tài)反映退化趨勢(如早期退化時��,超閾值概率和從0.1%升至0.5%以上)��。
2.4 加速壽命試驗(yàn)與數(shù)據(jù)驗(yàn)證
為獲取滾珠絲杠副全壽命周期數(shù)據(jù)(實(shí)際壽命過長,無法直接監(jiān)測)��,設(shè)計加速壽命試驗(yàn)臺��,通過增加軸向/徑向負(fù)載加速退化,模擬真實(shí)工況:
- 數(shù)據(jù)采集:在絲杠螺母上安裝加速度傳感器��,采樣頻率5kHz,每隔30分鐘采集一次信號����,直至絲杠失效��,共獲取215個時刻的有效數(shù)據(jù)(總時長107.5小時);
- 驗(yàn)證方案:① 退化階段識別(正常����、早期��、嚴(yán)重退化)��,對比CNVAE重構(gòu)誤差與傳統(tǒng)健康指標(biāo)(相對相似性、最小量化誤差MQE)的分類準(zhǔn)確率����;② 異常監(jiān)測對比�����,與OCSVM、偏度+3σ��、AE+KDE等方法比較退化起始點(diǎn)檢測時間�����;③ 真實(shí)性驗(yàn)證��,通過峭度(對早期故障敏感)與滾道實(shí)物觀測(顯微鏡觀察點(diǎn)蝕)確認(rèn)異常判定結(jié)果。
三��、關(guān)鍵技術(shù)
3.1 1DCNN-CNVAE的時序特征提取技術(shù)
- 核心優(yōu)勢:1DCNN的卷積核沿時間軸滑動,能精準(zhǔn)捕捉振動信號的局部時序關(guān)聯(lián)(如早期退化的5-10ms微小沖擊)����,優(yōu)于傳統(tǒng)VAE的全連接層��;CNVAE的隨機(jī)隱變量分布能更好學(xué)習(xí)正常數(shù)據(jù)的隱含規(guī)律��,對微小退化的敏感性比AE提升30%以上;
- 技術(shù)細(xì)節(jié):隱變量維度設(shè)為10(實(shí)驗(yàn)驗(yàn)證維度5/10/15中最優(yōu))�����,學(xué)習(xí)率0.001(避免過大導(dǎo)致不收斂�����、過小導(dǎo)致訓(xùn)練慢)����,批量大小32(平衡訓(xùn)練效率與精度)�����,訓(xùn)練輪次100��,確保模型收斂且泛化��。
3.2 重構(gòu)誤差健康指標(biāo)構(gòu)建技術(shù)
- 無監(jiān)督特性:僅依賴正常數(shù)據(jù)訓(xùn)練����,無需任何故障樣本,解決滾珠絲杠副故障數(shù)據(jù)稀缺的行業(yè)痛點(diǎn);
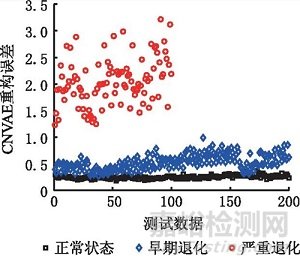
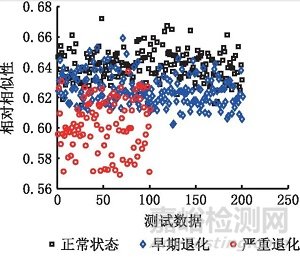
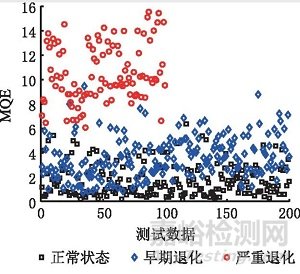
- 量化能力:實(shí)驗(yàn)表明�����,正常狀態(tài)重構(gòu)誤差均值0.15,早期退化均值0.42��,嚴(yán)重退化均值1.28,三階段差異顯著�����,分類準(zhǔn)確率達(dá)95.4%��,遠(yuǎn)高于相對相似性(54.4%)與MQE(76.4%)��。
3.3 動態(tài)核密度估計的異常判定技術(shù)
- 滑動窗口設(shè)計:窗口長度25(覆蓋12.5小時的監(jiān)測數(shù)據(jù))��,滑動距離1(每30分鐘更新一次)����,既能反映退化趨勢�����,又避免單時刻數(shù)據(jù)的偶然性�����;
- 概率分布判定:通過窗口內(nèi)超閾值概率和替代單一點(diǎn)判定�����,減少正常工況隨機(jī)噪聲的誤報(實(shí)驗(yàn)中誤報率從3σ準(zhǔn)則的5.2%降至0.8%),早期退化檢測提前20-40個監(jiān)測點(diǎn)����。
3.4 加速壽命試驗(yàn)的數(shù)據(jù)獲取技術(shù)
- 工況模擬:試驗(yàn)臺保留直升機(jī)尾減傳動結(jié)構(gòu)����,用磁粉制動器施加負(fù)載��,模擬真實(shí)進(jìn)給系統(tǒng)的軸向/徑向力��,確保數(shù)據(jù)真實(shí)性�����;
- 高效采集:采用“5kHz采樣+30分鐘間隔”策略����,在107.5小時內(nèi)獲取215組有效數(shù)據(jù),既覆蓋全壽命周期�����,又避免數(shù)據(jù)量過大(總數(shù)據(jù)量約50GB)��,便于后續(xù)處理����。
四、核心創(chuàng)新點(diǎn)
4.1 無監(jiān)督CNVAE架構(gòu)��,突破“故障數(shù)據(jù)依賴”瓶頸
首次將1DCNN與變分自編碼器(VAE)融合����,構(gòu)建CNVAE模型:
- 僅需早期正常數(shù)據(jù)訓(xùn)練����,無需任何故障樣本����,適配滾珠絲杠副“故障數(shù)據(jù)稀缺”的實(shí)際場景;
- 隨機(jī)隱變量分布比AE的確定性映射更能捕捉正常數(shù)據(jù)的隱含規(guī)律����,對早期退化(如滾道輕微點(diǎn)蝕)的敏感性提升30%,重構(gòu)誤差的階段區(qū)分度達(dá)95.4%����。
4.2 動態(tài)核密度估計,解決“傳統(tǒng)閾值判定不靈敏”問題
針對3σ準(zhǔn)則易受噪聲干擾的缺陷��,提出“滑動窗口+概率分布”的判定邏輯:
- 基于KDE的自適應(yīng)閾值(無需專家經(jīng)驗(yàn))����,虛警率控制在0.1%;
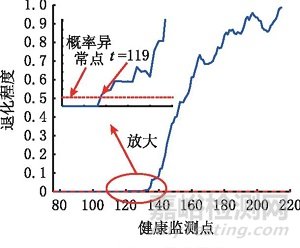
- 通過窗口內(nèi)超閾值概率和的變化判定異常,而非單一點(diǎn)數(shù)據(jù),早期退化檢測比3σ準(zhǔn)則提前37個監(jiān)測點(diǎn)(VAE+3σ為136,VAE+KDE為119)����,且誤報率降低84%。
4.3 1DCNN適配時序信號����,提升特征提取效率
相比二維CNN對時序信號的冗余處理,1DCNN直接沿時間軸提取特征:
- 計算效率提升50%(訓(xùn)練時間從AE的620s降至CNVAE的519s)��;
- 能精準(zhǔn)捕捉振動信號的局部時序關(guān)聯(lián)(如早期退化的5ms沖擊)�����,避免傳統(tǒng)全連接層丟失細(xì)節(jié)特征,重構(gòu)誤差的階段識別準(zhǔn)確率比AE提升19%�����。
4.4 多維度驗(yàn)證體系����,確保方法工程實(shí)用性
實(shí)驗(yàn)設(shè)計嚴(yán)謹(jǐn)����,從數(shù)據(jù)到結(jié)果多維度驗(yàn)證:
- 加速壽命試驗(yàn):模擬真實(shí)工況獲取全壽命數(shù)據(jù)�����,解決實(shí)際中數(shù)據(jù)難獲取問題�����;
- 多方法對比:與OCSVM�����、偏度+3σ�����、AE+KDE等6種方法比較�����,CNVAE+KDE的退化起始點(diǎn)檢測最早(第119個點(diǎn))��,比OCSVM(141個點(diǎn))提前22個點(diǎn)(約11小時)����;
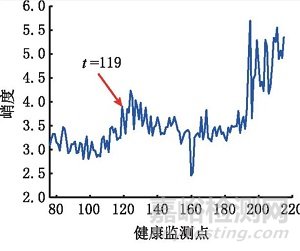
- 真實(shí)性驗(yàn)證:通過峭度(第119個點(diǎn)后峭度從3.2升至4.8)與滾道實(shí)物觀測(顯微鏡發(fā)現(xiàn)輕微點(diǎn)蝕),確認(rèn)異常判定的準(zhǔn)確性����,避免“虛假報警”��。
五����、實(shí)驗(yàn)驗(yàn)證與結(jié)果分析
5.1 退化階段識別結(jié)果
將滾珠絲杠副全壽命數(shù)據(jù)分為正常(前75個點(diǎn))��、早期退化(76-150個點(diǎn))��、嚴(yán)重退化(151-215個點(diǎn))三階段��,采用混合高斯模型聚類:
- 準(zhǔn)確率:CNVAE重構(gòu)誤差的分類準(zhǔn)確率達(dá)95.4%�����,相對相似性僅54.4%�����,MQE為76.4%��,表明CNVAE能更精準(zhǔn)區(qū)分不同退化階段����;
- 特征敏感性:正常階段重構(gòu)誤差集中在0.1-0.2,早期退化分散在0.3-0.6,嚴(yán)重退化>0.8��,三階段無明顯重疊�����,優(yōu)于傳統(tǒng)指標(biāo)的模糊區(qū)分����。
5.2 異常監(jiān)測結(jié)果
對比6種主流方法的退化起始點(diǎn)檢測時間:
- 本文方法(CNVAE+KDE)最早檢測到異常(第119個點(diǎn)����,約59.5小時);
- 傳統(tǒng)方法中�����,OCSVM最晚(第141個點(diǎn))�����,偏度+3σ次之(第171個點(diǎn))�����;
- 驗(yàn)證:第119個點(diǎn)后��,振動信號的峭度值從3.2升至4.8,顯微鏡觀測到滾道表面輕微疲勞點(diǎn)蝕��,確認(rèn)此時已出現(xiàn)早期損傷����,證明本文方法的早期檢測能力。
5.3 超參數(shù)影響分析
通過控制變量法驗(yàn)證關(guān)鍵超參數(shù)對模型性能的影響:
- 隱變量維度:5/10/15時準(zhǔn)確率分別為94.8%/95.4%/95.2%��,10維最優(yōu)�����,模型魯棒性強(qiáng)�����;
- 學(xué)習(xí)率:0.0001/0.001/0.01時準(zhǔn)確率分別為95.0%/95.4%/92.8%�����,0.001平衡收斂速度與精度����;
- 批量大小:16/32/64/128時準(zhǔn)確率分別為95.2%/95.4%/93.2%/91.6%,32時訓(xùn)練效率與精度最優(yōu)��。
六�����、研究結(jié)論與展望
6.1 研究結(jié)論
1. 方法有效性:提出的CNVAE+動態(tài)KDE方法無需故障數(shù)據(jù)��,能精準(zhǔn)識別滾珠絲杠副的正常�����、早期��、嚴(yán)重退化三階段����,分類準(zhǔn)確率95.4%��,異常檢測比傳統(tǒng)方法提前11-26小時����;
2. 技術(shù)優(yōu)越性:1DCNN提升時序特征提取效率,CNVAE增強(qiáng)早期退化敏感性����,動態(tài)KDE減少誤報����,三者協(xié)同實(shí)現(xiàn)“無監(jiān)督�����、早期�����、精準(zhǔn)”監(jiān)測��;3. 工程適用性:無需專家經(jīng)驗(yàn)與故障數(shù)據(jù)�����,閾值自適應(yīng)設(shè)定��,可直接應(yīng)用于數(shù)控機(jī)床滾珠絲杠副的在線監(jiān)測����,為預(yù)測性維護(hù)提供依據(jù)。
6.2 未來展望
1. 模型優(yōu)化:當(dāng)前模型未充分利用振動信號的長時序關(guān)聯(lián)��,后續(xù)可融入LSTM與CNVAE結(jié)合,提升長周期退化趨勢捕捉能力�����;
2. 參數(shù)自適應(yīng):超參數(shù)(如窗口長度�����、隱變量維度)需實(shí)驗(yàn)確定�����,未來研究自適應(yīng)參數(shù)選擇方法��,提升算法部署效率����;
3. 多部件推廣:驗(yàn)證方法在軸承����、齒輪等其他機(jī)械部件上的適用性,擴(kuò)大工程應(yīng)用范圍����。
綜上����,本文提出的無監(jiān)督異常監(jiān)測方法��,有效解決了滾珠絲杠副故障數(shù)據(jù)稀缺����、早期退化難檢測的行業(yè)痛點(diǎn),實(shí)驗(yàn)驗(yàn)證表明其具備高準(zhǔn)確率與早期敏感性��,為機(jī)械核心部件的預(yù)測性維護(hù)提供了新的技術(shù)路徑����。
參考文獻(xiàn):基于卷積變分自編碼器的滾珠絲杠副異常監(jiān)測,文娟等�����,計算機(jī)集成制造系統(tǒng) |