傳統(tǒng)外骨骼或拐杖式輔具往往在“剛性支撐”與“柔性順應(yīng)”之間顧此失彼��,更難以快速同步感知人體意圖��、補償浮基擾動并預(yù)判跌倒風(fēng)險���,導(dǎo)致患者“想用卻不敢用”的困境長期存在��。為此��,華中科技大學(xué)黃劍教授與武漢理工大學(xué)左潔副教授團隊圍繞外肢體機器人(SRL)的通用設(shè)計優(yōu)化���、動態(tài)控制、人機交互與運動安全監(jiān)測四大核心難題展開系統(tǒng)攻關(guān)���,近期在IEEE T-RO�����、IEEE T-ASE�����、IEEE-TBME��、IEEE-RAL等權(quán)威期刊發(fā)表系列成果�����,提出原創(chuàng)性理論框架與技術(shù)方案�����,設(shè)計了一種新型的上下肢通用外肢體機器人構(gòu)型��,成功兼顧上肢抓握與下肢行走支撐���、坐站位姿轉(zhuǎn)換等多種功能需求,顯著提升輔助機器人的適應(yīng)性���、安全性與交互自然度�����。該設(shè)計理論為多功能外肢體機器設(shè)計與創(chuàng)成提供了全新思路���,為卒中康復(fù)與老年助殘?zhí)峁┝苏嬲陕涞氐南乱淮悄芑鉀Q方案���。
01研究背景
全球每年新增卒中患者逾1200萬,其中約75%遺留不同程度的運動功能障礙��,而坐-站轉(zhuǎn)移���、步行等日常動作的穩(wěn)定性下降又使老年跌倒成為65歲以上人群傷害致死的首因�����。而外肢體在擴展人體工作空間��、增強肢體功能方面展現(xiàn)出巨大潛力�����,既可為健康人群提供功能增強支持�����,也可為患病群體提供康復(fù)訓(xùn)練輔助�����。然而�����,現(xiàn)有設(shè)計方法仍面臨多個關(guān)鍵瓶頸:
首先��,上下肢通用設(shè)計難度大��。傳統(tǒng)外肢體系統(tǒng)往往專注于上肢或下肢的單一功能���,上肢輔助通常強調(diào)靈巧性與柔順性��,而下肢輔助則更注重剛性支撐與穩(wěn)定性��,這兩類需求在機構(gòu)設(shè)計和控制策略上存在本質(zhì)沖突���,導(dǎo)致難以實現(xiàn)統(tǒng)一的設(shè)計框架��。
行走任務(wù)中的人機阻抗匹配難以保障��。浮基系統(tǒng)在運動過程中受到人體自身動態(tài)擾動與外部環(huán)境干擾的雙重影響��,進而造成交互狀態(tài)的不確定性,使得傳統(tǒng)阻抗控制策略難以準確匹配人體運動節(jié)奏���,限制了系統(tǒng)在自然行走過程中的實用性和穩(wěn)定性��。
由于患側(cè)肌電信號微弱且非平穩(wěn)��,傳統(tǒng)固定剛度或簡單肌電映射策略難以實現(xiàn)“恰如所需”的外肢體協(xié)同助力���;如何構(gòu)建患者個性化肌電-關(guān)節(jié)剛度映射關(guān)系,并在運動過程中持續(xù)動態(tài)補償神經(jīng)-機械延遲�����,正是本課題組提出sEMG-VSAIC變阻抗控制所必須攻克的瓶頸�����。
外肢體輔助坐-站的易跌位姿變換過程中穩(wěn)定性預(yù)測與安全防護也面臨挑戰(zhàn)�����。由于該動作持續(xù)時間短且質(zhì)心軌跡非周期��、支撐面不規(guī)則�����,傳統(tǒng)基于步態(tài)周期的預(yù)測模型難以對這類動作的穩(wěn)定性以及“即將跌倒”與“可自恢復(fù)”的臨界點進行準確判定。
02研究概述
基于功能化導(dǎo)電聚合物的設(shè)計���,研究團隊設(shè)計了功能化聚苯胺基時序黏附水凝膠貼片��。它可以實現(xiàn)心臟的同步機械生理監(jiān)測和電耦合治療��,并牢固附著在心臟表面監(jiān)測心臟的機械運動和電活動���。
1. 通用多功能外肢體橢球工作空間優(yōu)化與多目標協(xié)同設(shè)計
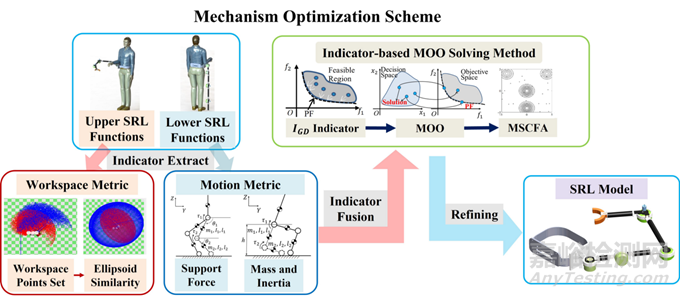
傳統(tǒng)外肢體機器人目前面臨幾個關(guān)鍵挑戰(zhàn):首先,上下肢功能存在割裂���,例如上肢的抓取靈活性與下肢的支撐剛性難以兼顧��;其次�����,在多目標優(yōu)化過程中���,高維不規(guī)則帕累托前沿易導(dǎo)致算法陷入局部最優(yōu)���,造成整機質(zhì)量過大(通常超過7公斤)�����,機器人的工作空間與人體實際運動之間不夠匹配��,并引發(fā)人機協(xié)同過程中的卡頓問題�����。團隊提出橢球工作空間相似性量化理論與多子群引斥力校正螢火蟲算法(MSCFA)���,構(gòu)建四目標優(yōu)化模型(工作空間匹配度��、支撐力��、質(zhì)量�����、慣性矩)���。通過最小體積包圍橢球描述機器人與人體肢體的位置、姿態(tài)、形狀及尺寸相似性��,計算復(fù)雜度較傳統(tǒng)點云方法顯著降低��。MSCFA算法引入吸引域與排斥域策略�����,收斂速度較NSGA-II提升40%��,單次迭代時間縮短至634秒��。優(yōu)化后SRL采用模塊化腰部佩戴設(shè)計���,4自由度串聯(lián)機構(gòu)總質(zhì)量控制在5.0kg�����,連桿長度配置為[0.1m, 0.4m, 0.29m, 0.21m]���,實現(xiàn):抓取任務(wù):健康受試者平均成功率提升7.2%,覆蓋自然肢體難以觸及區(qū)域���;行走支撐:小腿肌肉活動降低12.7%���,地面反作用力峰值減少11.3%-18.5%���。
(1)構(gòu)建面向上下肢通用功能的優(yōu)化設(shè)計理論:提出一套可復(fù)現(xiàn)人體日常上肢與下肢活動的SRL機器人優(yōu)化設(shè)計理論�����,并在此基礎(chǔ)上研制出具有通用化功能的樣機系統(tǒng)���,實現(xiàn)抓握�����、行走與坐站轉(zhuǎn)換等多項任務(wù)��。
圖1:通用SRL機器人系統(tǒng)架構(gòu)的框圖概覽(圖片來自原文)
(2)提出量化表達工作空間相似度的橢球幾何量化方法:設(shè)計了一種橢球體工作空間表示方法���,顯著降低了計算復(fù)雜度,并可定量提取工作空間特征��。此外�����,引入橢球相似性度量指標,用于精確描述不同工作空間之間的幾何關(guān)系�����。
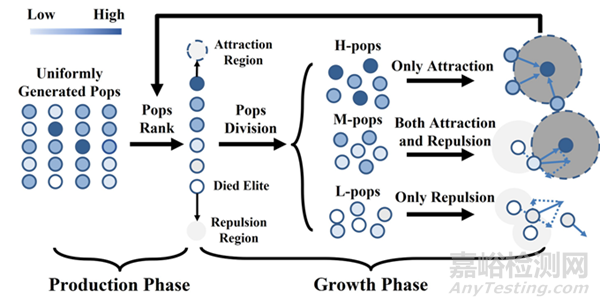
(3)構(gòu)建基于指標驅(qū)動的多目標優(yōu)化模型:提出融合上下肢工作空間相似度評估的多目標優(yōu)化模型���,并設(shè)計多子群校正螢火蟲算法(Multi-Subpopulation Correction Firefly Algorithm��,MSCFA)��,實現(xiàn)對高維不規(guī)則帕累托前沿的高效��、快速求解��。
圖2 所提MSCFA的示意圖:每個小圓圈代表算法中的一個單獨螢火蟲���。圓圈的顏色越深,表示該螢火蟲的適應(yīng)度越高��。高適應(yīng)度的個體將生成一個吸引區(qū)域��,用深色背景圓圈和虛線表示��。相反�����,低適應(yīng)度的個體將生成一個排斥區(qū)域,用淺色背景圓圈表示��。(圖片來自原文)
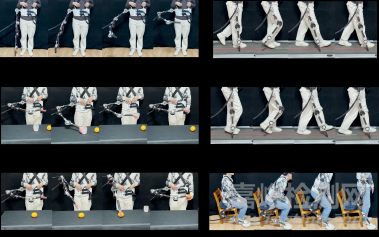
(4)通過仿真與實驗驗證原型系統(tǒng)有效性:所提出的SRL機器人樣機在仿真與實物實驗中均表現(xiàn)出良好性能��,能夠穩(wěn)定完成上肢抓握���、下肢輔助行走以及坐到站立等多項功能任務(wù),驗證了設(shè)計理論的實際可行性與通用性���。
圖3:外肢體輔助下實驗者完成多功能實驗(圖片來自原文)
2. 變阻抗自適應(yīng)控制:浮動基座外肢體機器人動態(tài)抗擾控制
浮動基座外肢體機械腿在步行輔助中面臨地面沖擊�����、人體運動不確定性等多源擾動���,傳統(tǒng)固定阻抗控制易導(dǎo)致人機交互“剛性碰撞”或“支撐不足”,嚴重影響輔助安全性�����。
團隊提出混合位置/力變阻抗控制(VIC)策略:髖關(guān)節(jié)采用變阻抗控制以適應(yīng)動態(tài)擾動�����,膝關(guān)節(jié)采用位置控制跟蹤步態(tài)軌跡。通過實時穩(wěn)定性保證阻抗參數(shù)生成網(wǎng)絡(luò)(RSG-IPGN)�����,根據(jù)步行階段動態(tài)調(diào)制阻抗��。實驗中���,健康受試者穿戴SRL行走時股四頭肌活動減少25.1%�����,軌跡跟蹤偏差<2°���,優(yōu)于固定阻抗控制(偏差5°)。
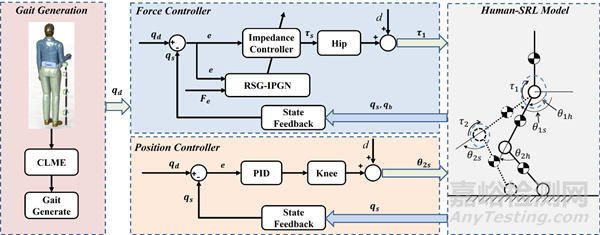
(1)構(gòu)建基于模型的松耦合動力學(xué)框架:針對人體軀干運動引起的內(nèi)部擾動�����,本研究建立了人體軀干與外肢體(SRL)之間的松耦合動力學(xué)模型�����,并提出融合浮基狀態(tài)反饋的混合位置/力控制策略,從而提升內(nèi)部擾動的觀測與補償能力���。
圖4:提出的浮基SRL實時控制系統(tǒng)示意圖(圖片來自原文)
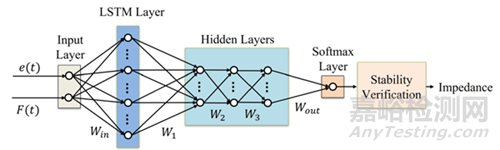
(2)提出狀態(tài)相關(guān)的可變阻抗控制方法:設(shè)計了一種狀態(tài)依賴的可變阻抗控制(Variable Impedance Control���,VIC)策略,并構(gòu)建了一個實時阻抗生成網(wǎng)絡(luò)�����,實現(xiàn)了關(guān)節(jié)阻抗的自適應(yīng)調(diào)節(jié)���,同時保障控制系統(tǒng)的閉環(huán)穩(wěn)定性。
圖5: 可變阻抗生成網(wǎng)絡(luò)(圖片來自原文)
3. 肌電驅(qū)動人機協(xié)調(diào):適應(yīng)患者自然運動關(guān)節(jié)發(fā)力的變阻抗控制
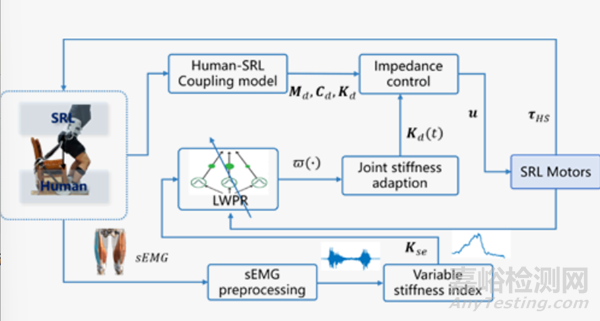
團隊提出表面肌電信號(sEMG)驅(qū)動的變剛度阻抗控制(sEMG-VSAIC)算法:采集健側(cè)股外側(cè)肌sEMG信號��,通過非線性歸一化處理(形狀因子ς)實時估計關(guān)節(jié)剛度���,作為SRL阻抗調(diào)整依據(jù)�����;動態(tài)調(diào)整慣性�����、阻尼及剛度等控制參數(shù)���,接觸階段低阻抗吸收沖擊���,支撐階段高阻抗提供剛性支撐;通過局部加權(quán)投影回歸(LWPR)算法在線優(yōu)化阻抗參數(shù)�����,校準時間僅需4.3±0.5分鐘�����。
圖6 基于sEMG變剛度補償?shù)腟RL人機協(xié)調(diào)控制算法整體框圖(圖片來自原文)
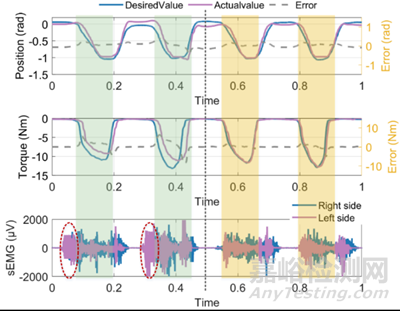
圖7 在無/有變剛度阻抗優(yōu)化下的SRL輔助性能對比(圖片來自原文)
臨床實驗中��,4名偏癱患者STS動作時間縮短39.3%��,患側(cè)股外側(cè)肌活動降低28.1%��,人體質(zhì)心波動范圍縮小16.6%���,避免健側(cè)代償導(dǎo)致的肌肉萎縮風(fēng)險�����。
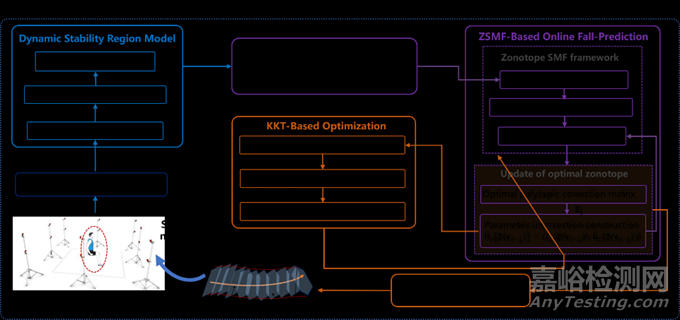
4. KKT優(yōu)化動態(tài)人體穩(wěn)定性監(jiān)測:外肢體輔助下易跌位姿動態(tài)預(yù)測
坐站轉(zhuǎn)移是老年人跌倒高發(fā)動作��,傳統(tǒng)靜態(tài)穩(wěn)定性評估(如質(zhì)心投影)忽視人體運動的動態(tài)特性���,導(dǎo)致預(yù)警滯后(>100ms)�����,穿戴式機器人難以實時響應(yīng)�����。團隊提出基于KKT優(yōu)化的Zonotope集員濾波(KKT-ZSMF)算法:
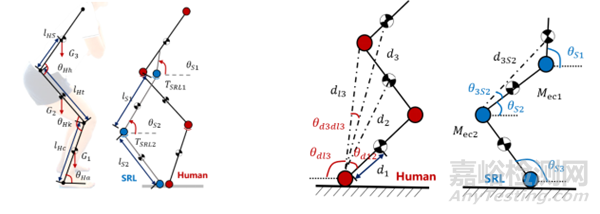
(1)人-外肢體動態(tài)穩(wěn)定性建模:通過Zonotope描述人體質(zhì)心(COM)的穩(wěn)定狀態(tài)集合��,融合位置(rx, ry)與速度(vx, vy)約束,覆蓋所有成功站立的最終狀態(tài)集合�����。
圖8 人-SRL耦合模型示意圖��。(a)人機模型幾何示意圖 (b)人和SRL的獨立模型(圖片來自原文)
(2)人體動態(tài)穩(wěn)定區(qū)間實時優(yōu)化:利用KKT條件將Zonotope轉(zhuǎn)換為Polytope并求解凸包��,實時迭代優(yōu)化穩(wěn)定區(qū)間的邊界���,單次迭代時間最長僅為7.91ms��。
圖9 面向外肢體防護輔助的易跌位姿失穩(wěn)動態(tài)預(yù)測算法框圖(圖片來自原文)
(3)臨床驗證:8名健康受試者跌倒預(yù)測準確率達93.49%��,較GD-ZSMF提升22.34%��;5名老年人實驗顯示��,算法對高風(fēng)險人群(步速<0.6m/s)的穩(wěn)定狀態(tài)識別靈敏度達100%�����。
5. 健康人與偏癱病人肢體運動輔助實驗驗證(可貼視頻附件)
為驗證所設(shè)計外肢體機器人輔助功能的有效性能���,在華中科技大學(xué)同濟醫(yī)學(xué)院附屬協(xié)和醫(yī)院康復(fù)科醫(yī)生指導(dǎo)下��,招募偏癱患者分別進行了輔助抓握�����、輔助行走���、輔助起坐三個功能測試。
圖10 偏癱患者參與SRL 抓取功能測試(圖片來自原文)
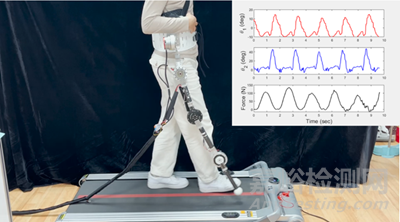
圖11 健康人參與行走輔助任務(wù)功能測試(圖片來自原文)
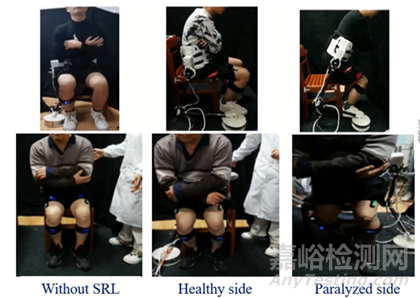
圖12 健康人與偏癱患者參與坐站轉(zhuǎn)換任務(wù)功能測試(圖片來自原文)
03研究意義
本課題組通過結(jié)構(gòu)設(shè)計、動態(tài)控制�����、人機協(xié)同與安全感知四個方向的協(xié)同創(chuàng)新工作�����,系統(tǒng)性推動外肢體機器人從實驗室原型邁向臨床轉(zhuǎn)化與日常應(yīng)用�����,科研突破與社會價值顯著���。團隊首次建立兼顧上下肢功能的SRL設(shè)計框架��,提出的橢球相似性指標為可穿戴機器人提供通用量化標準��,并突破了浮動基座機器人動態(tài)穩(wěn)定性控制難題��;另外��,基于sEMG 的關(guān)節(jié)阻抗映射與增量學(xué)習(xí)的變阻抗控制,實現(xiàn)了偏癱患者主導(dǎo)的快速個性化輔助�����;而所提出的 KKT-ZSMF動態(tài)穩(wěn)定性預(yù)測算法,能為坐-站等短時非周期動作提供低延時實時跌倒預(yù)警���,從而有效保障外肢體輔助的安全性��。相關(guān)成果既開創(chuàng)了外肢體機器人相關(guān)新理論與新方法��,也積極響應(yīng)了我國卒中康復(fù)與老齡化社會助老助殘的迫切需求��,輕量化�����、多功能外肢體構(gòu)型為未來開展大規(guī)模臨床驗證��、家庭康復(fù)部署及產(chǎn)業(yè)化落地奠定了堅實的技術(shù)與應(yīng)用基礎(chǔ)�����。
參考文獻:
[1] J. Huo, J Huang*, J. Zuo*, B. Yang, Z. Fu, X. Li, Samer Mohammed, “Innovative Design of Multifunctional Supernumerary Robotic Limbs With Ellipsoid Workspace Optimization”, IEEE Transactions on Robotics, vol. 41, pp. 4699-4718, 2025.
[2] J. Huo, Kehan Xu, Chengyao Li, Yu Cao, Jie Zuo, Xinxing Chen*, Jian Huang*, “Variable Impedance Control for Floating-Base Supernumerary Robotic Leg in Walking Assistance,” IEEE Robotics and Automation Letters, vol. 10, no. 9, pp. 8698-8705, 2025.
[3] J. Zuo, J. Huo, X. Xiao, Z. Zhang, J. Huang*, “Human-robot Coordination Control for Sit-to-Stand Assistance in Hemiparetic Patients with Supernumerary Robotic Leg”, IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 16591-16602, 2025.
[4] J. Zuo, B. Yang, X. Xiao, C. Sun, J. Huang*, “Online Monitoring for Human Sit-to-Stand Movement Based on Karush-Kuhn-Tucker Optimized Zonotope Set-Membership Filter,” IEEE Transactions on Biomedical Engineering, vol. 71, no. 3, pp. 758-771, 2024.