摘要:針對衛(wèi)星姿態(tài)控制系統(tǒng)(ACS)變工況下的故障診斷問題���, 提出一種基于多尺度殘差對抗網(wǎng)絡(luò)的故障診斷方法。 該方法以領(lǐng)域?qū)箤W(xué)習(xí)策略為基礎(chǔ)�����, 設(shè)計了多尺度自適應(yīng)特征提取模塊�, 可實現(xiàn)對不同信號的自適應(yīng)特征提取并將其映射到同一特征空間; 該方法還引入了梯度反轉(zhuǎn)層對領(lǐng)域分類代價進行反向傳播�����, 在保證域不變性的同時實現(xiàn)對故障的標簽分類�����。 最后�����, 利用某衛(wèi)星ACS地面半物理仿真平臺數(shù)據(jù)進行試驗驗證�����, 證明了所提方法具有良好效果�����, 為提高衛(wèi)星ACS的可靠性提供了有效途徑�����。
關(guān)鍵詞:故障診斷�;姿態(tài)控制系統(tǒng)可靠性;人工智能���;深度學(xué)習(xí)
作者:馬淑君�����;段欣欣�����;霍衛(wèi)杰�����;朱迪�;朱蕾
作者單位:上海航天電子技術(shù)研究所
引言
故障診斷是保證現(xiàn)代控制系統(tǒng)安全性和可靠性的必備技術(shù),經(jīng)過50多年的發(fā)展�����,該技術(shù)已在航空航天�、軌道交通、智能制造等領(lǐng)域進行了應(yīng)用���。衛(wèi)星本體與執(zhí)行機構(gòu)���、控制機構(gòu)、敏感元件共同構(gòu)成姿態(tài)控制閉環(huán)�����,是保障衛(wèi)星運行能力的關(guān)鍵分系統(tǒng)之一�。衛(wèi)星ACS本身結(jié)構(gòu)復(fù)雜冗余, 且其復(fù)雜的工作任務(wù)與惡劣的運行環(huán)境導(dǎo)致系統(tǒng)極易發(fā)生故障[1-2]�����,給衛(wèi)星的在軌可靠性帶來了極大的挑戰(zhàn)。因此�����,對衛(wèi)星姿態(tài)控制系統(tǒng) (ACS)的故障進行診斷�,是確保其可靠運行的重要保障,也是提高系統(tǒng)健康運行能力的要求[3]�����。
近年來�, 眾多專家學(xué)者從多角度開展了衛(wèi)星ACS 的故障診斷研究�����。文獻[4]中使用不確定性分解開發(fā)了一種自適應(yīng)故障補償方案�,研究了穩(wěn)定反饋框架下微小衛(wèi)星執(zhí)行器故障診斷問題。文獻[5]中基于姿態(tài)運動學(xué)模型和傳感器測量方程�����, 提出了一種自適應(yīng)擴展卡爾曼濾波器(EKF)���, 將其用于姿態(tài)傳感器�。文獻[6]中提出了一種基于深度學(xué)習(xí)的方法,用于診斷推進器故障�。然而, 這些研究工作只是針對設(shè)備在同一工況下的情況�,即模型的測試集與訓(xùn)練集必須服從同一概率分布。在系統(tǒng)的實際運行中���,衛(wèi)星的工況與環(huán)境并非恒定�����,導(dǎo)致診斷模型的泛化性能降低�����,難以在新的工況下完成診斷任務(wù)�����。對此�,領(lǐng)域自適應(yīng)方法不失為一個有效的解決方案[7]���。領(lǐng)域自適應(yīng)作為遷移學(xué)習(xí)的重要思想�,可利用已有知識解決不同但相關(guān)領(lǐng)域的學(xué)習(xí)問題�����,從而完成知識的遷移。
領(lǐng)域自適應(yīng)對抗策略是一種基于領(lǐng)域自適應(yīng)思想的對抗學(xué)習(xí)方法�����,可以將一個領(lǐng)域?qū)W習(xí)到的知識遷移到另一個領(lǐng)域中�����,在提高樣本間的分辨能力的同時盡可能降低對領(lǐng)域的區(qū)分性���,為模型泛化能力的提升提供了一些有效嘗試。雖然領(lǐng)域?qū)箤W(xué)習(xí)策略在圖像識別和自然語言處理等諸多領(lǐng)域都有應(yīng)用���,但在故障診斷方面尚未得到充分研究�����,存在巨大潛力�����。
針對變工況下故障診斷的難點���,本文提出了一種基于多尺度殘差對抗網(wǎng)絡(luò)的變工況故障診斷方法�。該方法以深度神經(jīng)網(wǎng)絡(luò)架構(gòu)和領(lǐng)域?qū)箤W(xué)習(xí)策略為基礎(chǔ)���,設(shè)計了多尺度自適應(yīng)特征提取模塊�,通過多尺度采樣和激活函數(shù)的自適應(yīng)變換���, 提高了對不同工況下數(shù)據(jù)潛在故障信息的學(xué)習(xí)與表征能力�����,同時引入梯度反轉(zhuǎn)層對領(lǐng)域分類代價進行反向傳播�����,縮小了領(lǐng)域分布差異�。最后�����,利用某型衛(wèi)星ACS的半物理仿真平臺數(shù)據(jù)對所提出的診斷方法進行了試驗驗證�����。
1 問題分析
從原始數(shù)據(jù)中提取故障特征是基于人工智能診斷方法的關(guān)鍵,它決定了診斷的準確性�����。然而�,在真實的工業(yè)場景中,隨著工作環(huán)境和任務(wù)的變化�����,衛(wèi)星工作條件的變化使其狀態(tài)監(jiān)測數(shù)據(jù)分布也發(fā)生了變化���,通常表現(xiàn)為數(shù)值振幅和頻率特性的變化���,一般的診斷模型會出現(xiàn)明顯的精度下降,這就要求診斷模型有較強的泛化性能�,可以處理數(shù)據(jù)域分布改變后的跨域診斷問題���。因此�����,如何在變工況情況下對本就難以提取特征的衛(wèi)星ACS故障進行診斷�,是本文亟待解決的具有挑戰(zhàn)性的問題。
在變工況下對衛(wèi)星ACS進行重復(fù)采集�,可獲得不同工況下的監(jiān)測數(shù)據(jù)集。將在某一工況下收集的帶有故障標簽的數(shù)據(jù)S設(shè)為源數(shù)據(jù)集�����,該數(shù)據(jù)集包含n個樣本xi�����,標簽為yi�,分布為 S={( xi,y) }ni=1 ~ (SD)n �。將在其他工況下收集的不帶有故障標簽的數(shù)據(jù) τ 為目標域數(shù)據(jù)集, 該數(shù)據(jù)集包含n'個樣本xi�, 分布為
,表示不同工況的總樣本數(shù)�����,監(jiān)測數(shù)據(jù)樣本xi | Ni=1屬于樣本空間X�����,標簽空間Y= {1���,…�����,L } 為L個可能的故障類別的標簽�����。
基于上述條件�����,本文的目標即建立一個能夠?qū)W習(xí)映射函數(shù)的變工況故障診斷模型F:X→Y�, 利用源集合S中的數(shù)據(jù)訓(xùn)練該診斷模型,使其對目標集τ的標簽預(yù)測代價最低�����,且SD和TD的差異在F中最小���。這種差異可表示為以下代價函數(shù)
式中:P表示源域與目標域分布的偏差。上述領(lǐng)域分布差異在本文中采用散度H來衡量�。變工況下的故障診斷問題就轉(zhuǎn)化成:如何挖掘不同數(shù)據(jù)分布間的相同特征以完成信息遷移,從而有效地降低由工況變化引起的數(shù)據(jù)分布差異的影響�����,提高故障診斷精度。
2 基于多尺度殘差對抗網(wǎng)絡(luò)的故障診斷
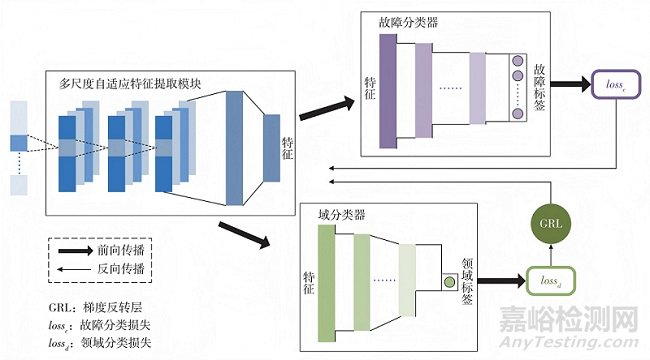
針對變工況條件下的衛(wèi)星ACS故障診斷問題���,本文提出了一種基于多尺度殘差對抗網(wǎng)絡(luò)的診斷方法�,包括多尺度自適應(yīng)特征提取模塊Fm���、故障分類器Gc和域分類器Gd這3個模塊�����,如圖1 所示���。其中,F(xiàn)m提取不同工況下故障數(shù)據(jù)的特征�,將其映射到同一分布上;Gc和Gd被連接到同一特征提取器之后�����,分別實現(xiàn)故障標簽的分類與樣本工況來源的區(qū)分�。下面將分別介紹各模塊與網(wǎng)絡(luò)的整體框架。
圖1 診斷方法模塊與網(wǎng)絡(luò)整體框架
2.1 多尺度自適應(yīng)特征提取模塊
對于不同工況下存在分布差異的衛(wèi)星ACS監(jiān)測數(shù)據(jù)���,僅通過網(wǎng)絡(luò)深度的堆疊難以充分提取故障特征并將其完全映射到同一分布上���。因此�����,設(shè)計了多尺度自適應(yīng)特征提取模塊���,該模塊以殘差單元為基本組成,通過多尺度采樣操作實現(xiàn)對不同層次故障信息的挖掘�;引入自適應(yīng)激活函數(shù), 根據(jù)輸入信號的特點靈活地調(diào)整非線性變換方式���,以提高對潛在故障信息的學(xué)習(xí)與表征能力���。
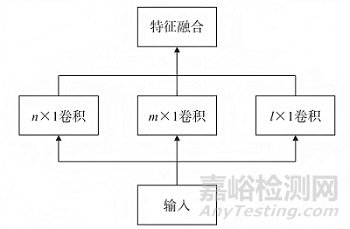
1) 多尺度特征提取單元考慮到衛(wèi)星ACS的狀態(tài)監(jiān)測數(shù)據(jù)復(fù)雜且不同工況下的差異無法確定,所隱含的故障信息也呈現(xiàn)多樣化的特點���,單一尺度的特征將不能完全反映其狀態(tài)情況���,故引入多尺度特征提取單元,如圖2所示�����。
圖2 多尺度特征提取單元構(gòu)成
相較于一般的卷積層���,多尺度特征提取單元呈三通道并行結(jié)構(gòu)���,將不同卷積核和步長的卷積塊組合進行特征提取,可以同時學(xué)習(xí)不同精細程度的故障特征信息���。小尺寸的卷積核可以提取精細化的特征�����,對高頻變化量敏感���;大尺寸的卷積核擁有更大的感受野,可以學(xué)習(xí)長時間尺度內(nèi)的特征���,對低頻變化量較敏感���。因此,將不同尺寸的卷積核進行結(jié)合可以提取更加豐富靈活的故障特征;然后���,利用級聯(lián)層將不同尺度下提取的故障特征信息進行拼接���,形成新的特征。
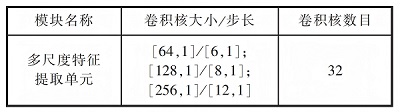
對于本文所使用的長度為1024個數(shù)據(jù)點的衛(wèi)星 ACS 監(jiān)測信號樣本���,多尺度特征提取單元中卷積核的具體參數(shù)如表1所示�。
表1 多尺度特征提取單元參數(shù)
2) 自適應(yīng) ReLU 激活函數(shù)
在深層網(wǎng)絡(luò)中�����,上下層的神經(jīng)元通過激活函數(shù)連接�����,激活函數(shù)通過引入非線性變換使網(wǎng)絡(luò)具有更強的非線性表征能力�。ReLU(x)=max(0,x)是最常用的激活函數(shù)之一�����,其利用單側(cè)抑制和稀疏激活的特點使網(wǎng)絡(luò)能更好地表征輸入信息���。
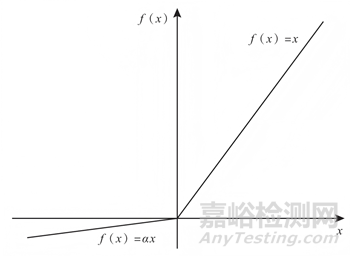
基于人工智能的診斷方法的本質(zhì)是挖掘ACS監(jiān)測信號中可以分辨故障類別的特征信息�����,將同一狀態(tài)下的數(shù)據(jù)映射到相近的區(qū)域�����,將不同狀態(tài)下的數(shù)據(jù)隔開�。隨著工況條件的變化�����,同一狀態(tài)下的監(jiān)測信號會出現(xiàn)不同的特征(例如脈沖���、波動波形)���,不同狀態(tài)下的數(shù)據(jù)也可能變得相似。 在使用傳統(tǒng)激活函數(shù)的診斷模型中�����,對所有樣本均采用固定的非線性映射變換���,這樣極大地限制了診斷模型對不同工況下監(jiān)測信號的學(xué)習(xí)能力���, 導(dǎo)致特征難以被映射到正確的區(qū)域�����。對此�����,文獻[8]中通過在ReLU函數(shù)中增加1個可學(xué)習(xí)參數(shù)項�, 使網(wǎng)絡(luò)具有更強的擬合能力�。改進的PReLU函數(shù)如圖3所示,可描述為
式中:α為非線性變換系數(shù)�,在測試時為固定的常數(shù),無法根據(jù)不同的輸入數(shù)據(jù)進行動態(tài)的調(diào)整�����。
圖3 改進的 PReLU 函數(shù)圖像
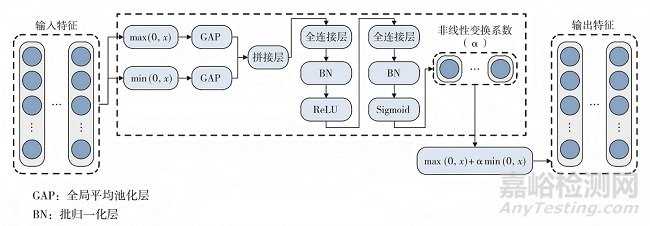
因此�����,本文在殘差單元中引入基于自適應(yīng)Re-LU函數(shù)的殘差單元�����,通過嵌入1個子網(wǎng)絡(luò)模塊,使網(wǎng)絡(luò)可以根據(jù)輸入的ACS監(jiān)測信號特性�����, 靈活地調(diào)整PReLU函數(shù)中的非線性變換系數(shù)���, 選擇對當前任務(wù)最有利的非線性變換方式,增強網(wǎng)絡(luò)對不同工況下ACS泛化故障特征的學(xué)習(xí)性能�����。自適應(yīng)ReLU激活函數(shù)的原理如圖4所示���。
圖4 自適應(yīng) ReLU 激活函數(shù)原理
在自適應(yīng)ReLU的子網(wǎng)絡(luò)模塊中���,首先將上層網(wǎng)絡(luò)的輸出特征同時輸入到2個通道,第1通道將輸入特征經(jīng)max(0�����,x)和GAP映射傳播���,用于計算正特征的全局信息�;第2通道將輸入特征經(jīng)min(0,x)和GAP映射傳播���,用于計算負特征的全局信息�。同時���,利用 max(0���,x)和min(0,x)來綜合考慮正負特征信息���,GAP層則降低了監(jiān)測信號中脈沖或波動的空間位移所帶來的影響���,增強了特征提取的穩(wěn)定性。
然后�����,利用級聯(lián)層將2個通道輸出的一維向量進行連接���,再依次通過全連層�、BN層、ReLU函數(shù)�、全連層、BN層和Sigmoid函數(shù)得到1組一維向量���,即非線性變換系數(shù)α�����。其中���,每個全連層的神經(jīng)元數(shù)量與輸入特征映射中的通道數(shù)一致,分別使用Sigmoid和ReLU函數(shù)�,為非線性變換系數(shù)α的計算提供2級非線性變換�,控制梯度范圍并防止系數(shù)值α過大。最后���,將α與輸入特征相乘得到最終的特征輸出���。
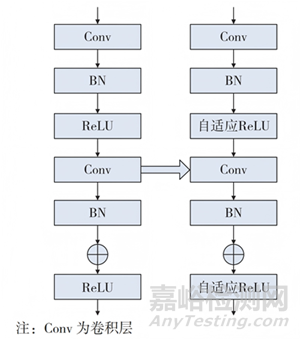
在上述過程中,自適應(yīng)ReLU函數(shù)通過同時參考正�����、負特征的全局信息來確定非線性變換系數(shù)α,這樣可以根據(jù)輸入信號的特點靈活地調(diào)整非線性變換方式�����,從而充分挖掘不同分布下數(shù)據(jù)的故障特征信息�。多尺度自適應(yīng)特征提取模塊將殘差單元的ReLU激活函數(shù)替換為自適應(yīng)ReLU函數(shù)�,改進后的殘差單元如圖5所示。
圖5 自適應(yīng)ReLU殘差單元
多尺度自適應(yīng)特征提取模塊Fm由多尺度特征提取單元和多個自適應(yīng)ReLU殘差單元構(gòu)成�。假設(shè)輸入數(shù)據(jù) xi∈Rm為 m 維故障樣本,在特征提取過程中�,F(xiàn)m將輸入數(shù)據(jù)映射為一個新的n維特征���,即f:xi→Rn�����,表示為
式中�,θm為多尺度自適應(yīng)特征提取模塊Fm的網(wǎng)絡(luò)參數(shù)�����。
2.2故障分類器模塊
故障分類器Gc根據(jù)多尺度自適應(yīng)特征提取模塊的輸出特征對輸入數(shù)據(jù)xi進行故障類別的判斷,
定義樣本標簽空間Y={1�����,…�,L} 為L個可能的健康和故障類別標簽,則故障分類器Gc學(xué)習(xí)分類映射關(guān)系Gc : Rn→RL�����, 使用 softmax 層計算預(yù)測標簽�, 樣本 xi的診斷結(jié)果可表示為
式中,θc為故障分類器Gc的網(wǎng)絡(luò)參數(shù)���。
對于源域的輸入樣本(xi,yi)|ns i=1定義分類交叉熵為故障分類器的損失�,故障分類的代價函數(shù)可以描述為
式中:ns為源域樣本量�;lossc�����,i(θm ,θc)為單個輸入樣本xi的故障分類損失���。
2.3 域分類器模塊
域分類器Gd根據(jù)特征提取網(wǎng)絡(luò)的輸出特征對輸入數(shù)據(jù) xi進行領(lǐng)域的判斷�,即判斷輸入數(shù)據(jù)來自源工況還是目標工況�。為了使診斷模型在工況發(fā)生改變時仍保持高診斷精度,需要網(wǎng)絡(luò)所提取的特征盡可能少地包含對領(lǐng)域的鑒別信息。因此�,在Fm與Gd間引入了梯度反轉(zhuǎn)層 (GRL)�, 反向傳播中以Gd最后一層的反向傳播誤差乘以 -ρ,其中ρ∈(0�,1],實現(xiàn)梯度逆轉(zhuǎn)傳播至 Fm �����,以達到Gc與Gd的“對抗” 效果�����。
域分類器Gd采用交叉熵來衡量領(lǐng)域分類的損失���,代價函數(shù)Jd可表示為
式中�,θd為全局領(lǐng)域分類器Gd的網(wǎng)絡(luò)參數(shù)�����;lossid (θm���,θd)為單個樣本的領(lǐng)域分類損失。
2.4 目標函數(shù)
綜合上述3個部分內(nèi)容�����,本文所提的故障診斷方法的整體目標函數(shù)為
式中:δ為平衡系數(shù)�,Jcl和Jd分別為故障分類和域分類的代價函數(shù)�����。
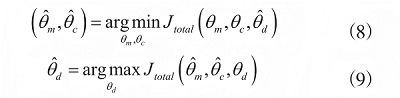
對抗學(xué)習(xí)策略的優(yōu)化目標即為找到一組最優(yōu)參數(shù) θm ���,θc �����,θd ���,使得故障分類器Gc的代價最小,同時域分類器Gd的代價最大�����。優(yōu)化目標可以表示為
式中:
為模型收斂時各參數(shù)的最優(yōu)解�。模型以最小化目標函數(shù)進行訓(xùn)練�,當?shù)螖?shù)達到給定的最大輪數(shù)后予以保存。得到的模型可以用于工況改變后目標域的故障診斷�����,輸入測試樣本即可得到診斷結(jié)果���。
3 試驗結(jié)果
為了證明本文所提診斷方法的有效性,將該方法在某衛(wèi)星半物理仿真平臺的變工況故障數(shù)據(jù)集上進行試驗���。在獲取數(shù)據(jù)時�,設(shè)置一種固定工況A,分別注入7種不同故障�����,編號設(shè)為1~7�����, 健康狀態(tài)編號設(shè)為0�����,為有標簽的源域數(shù)據(jù)集�。 每類故障或健康數(shù)據(jù)中包含450個樣本�,長度為 1024,維度包含37維非標志類信號特征���,即數(shù)據(jù)型為(450,1024�,37)���,對應(yīng)450×1的標簽集。為滿足變工況診斷的需求,設(shè)置工況B�,和工況A下的故障類型與樣本型一致���,為無標簽?zāi)繕擞驍?shù)據(jù)集���。源域數(shù)據(jù)和部分目標域數(shù)據(jù)用于網(wǎng)絡(luò)的訓(xùn)練�,其余目標域數(shù)據(jù)用于測試�。迭代次數(shù)為100,學(xué)習(xí)率根據(jù)一般經(jīng)驗初始設(shè)為0.01,采用隨機梯度下降算法(SGD)進行參數(shù)優(yōu)化。
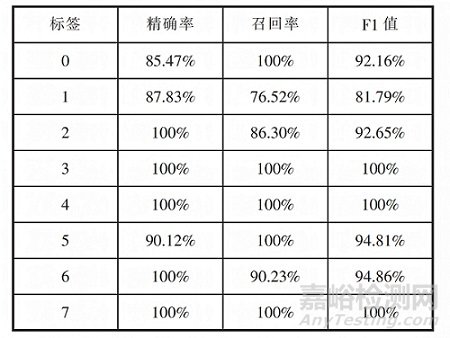
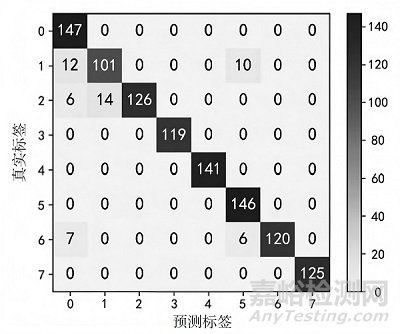
本文所提的多尺度殘差對抗網(wǎng)絡(luò)在變工況下的故障診斷任務(wù)中,故障診斷結(jié)果和混淆矩陣分別如表2�、圖6所示���。
表2 故障診斷結(jié)果圖
6 故障診斷結(jié)果混淆矩陣
其中,精確率反映了故障的誤診情況,值越大表示被誤診的樣本越少���;召回率表示故障的漏診率�����,值越大表示被漏診的樣本越少�����;F1值用來綜合考量診斷模型的精確率和召回率�����,對其綜合性能進行評價。
混淆矩陣中的橫縱坐標分別表示模型的預(yù)測標簽與真實標簽���,對角線為測試集中每類被正確診斷樣本量�。由表2和圖6可以看出�,目標域的整體診斷準確率達到了94%以上���,僅有健康狀態(tài)�����、 故障1和故障2存在部分混淆,表明本文所提方法對衛(wèi)星ACS的跨域診斷能力較強���,可以滿足變工況條件下的故障診斷需求。
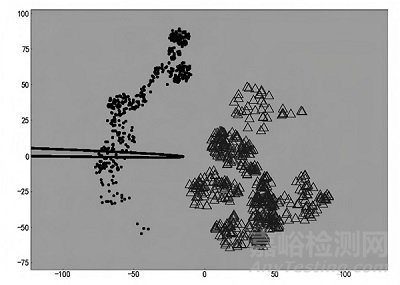
為了更加直觀地展示網(wǎng)絡(luò)性能���,經(jīng)過多尺度殘差對抗網(wǎng)絡(luò)訓(xùn)練后的數(shù)據(jù)領(lǐng)域分布情況如圖7所示�。其中:紅色三角表示源域樣本,黑色點表示目標域樣本�,紫色部分表示源域的域空間分布���,灰色部分表示目標域的域空間分布���??梢姡?經(jīng)本文所提模型訓(xùn)練后�����,來自2種工況的數(shù)據(jù)多數(shù)處于同一種領(lǐng)域空間分布,表明本文所提模型具有良好的領(lǐng)域自適應(yīng)效果。
圖7 數(shù)據(jù)領(lǐng)域分布情況
4 結(jié)束語
針對衛(wèi)星ACS在變工況下由于數(shù)據(jù)分布差異而引起的模型診斷精度低的問題,本文提出了一種基于多尺度殘差對抗網(wǎng)絡(luò)的故障診斷方法���。該方法基于領(lǐng)域?qū)箤W(xué)習(xí)策略�,設(shè)計了多尺度自適應(yīng)特征提取模塊���,以實現(xiàn)對不同層次故障信息的挖掘���;利用自適應(yīng)激活函數(shù)���,根據(jù)輸入信號靈活調(diào)整非線性變換方式,提高對不同工況下數(shù)據(jù)潛在故障信息的學(xué)習(xí)與表征能力�����,然后�,引入梯度反轉(zhuǎn)層進行反向傳播�����,從而縮小分布差異�。最后�,利用半物理仿真數(shù)據(jù)進行試驗驗證,結(jié)果表明�����,所提的多尺度殘差對抗網(wǎng)絡(luò)具有良好的診斷性能���,可以在變工況條件下對衛(wèi)星ACS故障進行有效的診斷。由于數(shù)據(jù)資源與時間的限制���,所研究的故障類型均為單一故障,但在實際運行中衛(wèi)星ACS可能會同時出現(xiàn)多重故障�����,后續(xù)研究中可以考慮復(fù)合故障下的衛(wèi)星ACS故障診斷問題�����。
參考文獻
[1] HUANG W, SUN H, WANG W. Resonance-based sparse signal decomposition and its ap-plication in mechanical fault diagnosis: a re-view[J]. Sensors, 2017,17 (6):1279-1305.
[2] TIPPING M E. Sparse bayesian learning and the relevance vector machine[J]. Journal of ma-chine learning research, 2001�����,1(6) :211 -244.
[3] XIAO B, KARIMI H R, YU X, et al. IEEE Access Special Section: Recent advances in fault diagnosis and fault -tolerant control of aerospace engineering systems[J].IEEE Access,2020(8):61157-61160.
[4] LECUN Y, BENGIO Y, HINTON G. Deep learning[J]. Nature���,2015(521):436-444.
[5] YANG Z, XU B, LUO W, et al. Autoencoder-based representation learning and its application in intelligent fault diagnosis: a review [J]. Mea-surement, 2022(189):11460-11472.
[6] CEN J, YANG Z, LIU X, et al. A review of data -driven machinery fault diagnosis using machine learning algorithms[J]. Journal of vi-bration engineering & technologies, 2022�����,10(7):2481-2507.
[7] PAN SJ. A survey on transfer learning[J]. IEEE Transaction knowledge and data engineering,2010,22(10):1345-1359.
[8] HE K, ZHANG X, REN S, et al. Delving deep into rectifiers: surpassing human - level perfor-mance on imagenet classification [C] //IEEE.Proceedings of the IEEE International Confer-ence on Computer Vision, 2015. New York:IEEE�����,2015:1026-1034.